В этой статье я постараюсь подробно описать набор, включающий в себя полетный контроллер и плату с четырьмя 32-х битными регуляторами оборотов поддерживающею протокол DSHOT1200. Соберем квадрокоптер и полетаем на нем. Если Вы неравнодушны к тематике данного вида хобби – прошу под кат.
Комплект поставки
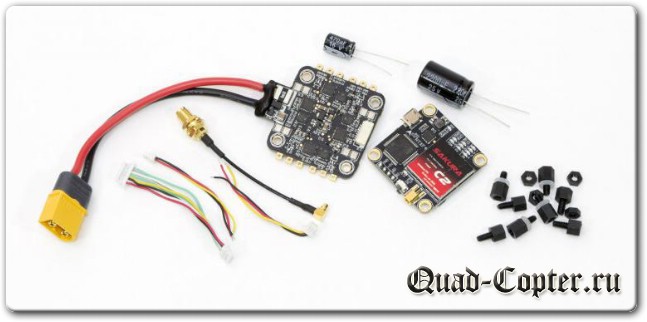
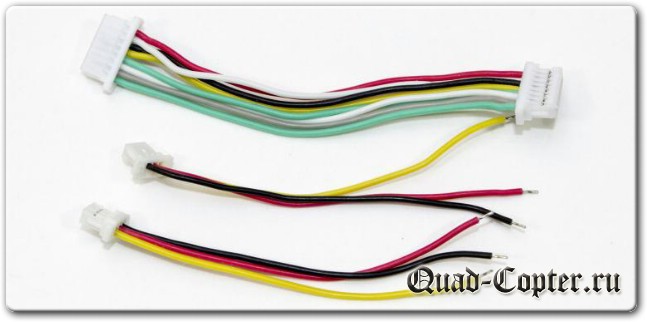
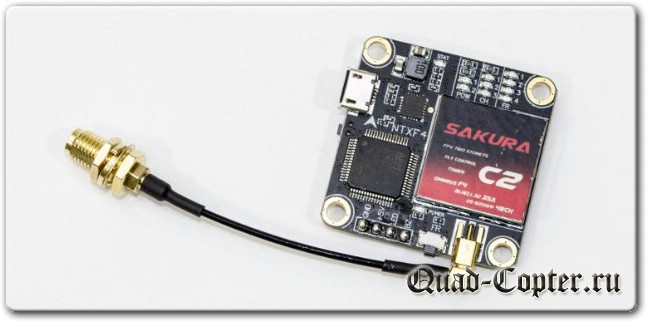
Комплект для установки на квадрокоптер – AuroraRC C2, включает в себя: полетный контроллер на базе процессора F4; плату регулятора оборотов бесколлекторных электромоторов; шлефы для подключения камеры, приемника и регулятора; комплект крепления к раме квадрокоптреа с демпфирующими вставками; электролитические конденсаторы – 2200µ/25В и 470µF/16В; пигтейл – MMCX/SMA.
Фото упаковки
Дополнительные фото комплекта
Общая информация о комплекте
Комплект AuroraRC C2 состоящий, из полетного контроллера на базе процессора F4 и комбинированного регулятора оборотов 4 в одном, предназначен для установки на рамы, рассчитанные на использование пяти дюймовых пропеллеров.
Параметры платы полетного контроллера.
Отверстия для крепления: 30.5x30.5мм
Размер: 36x36 мм
Вес: 9г
Процессор: STM32F4
Датчик: MPU6000
Прошивка: betaflight_3.2.0_OMNIBUSF4SD
OSD: AT7456E
VTX: Интегрированный видео передатчик 5.8G, 48 каналов, 25/100/200/400/600mW
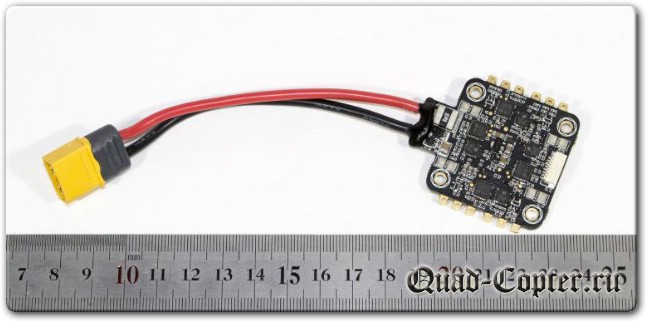
На регулятор уже были припаяны провода 14AWG и разъем XT60 для подключения аккумулятора. Длина проводов 100 мм.
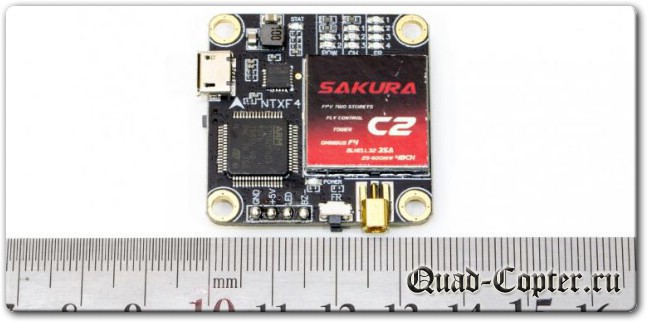
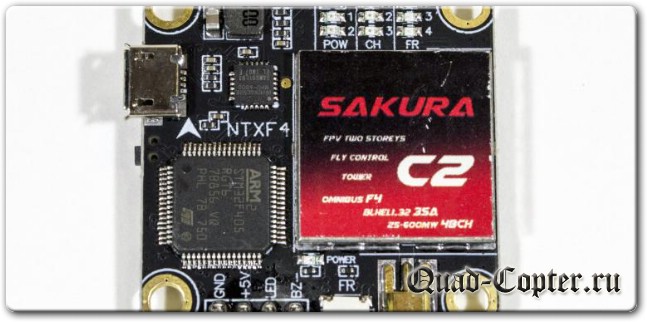
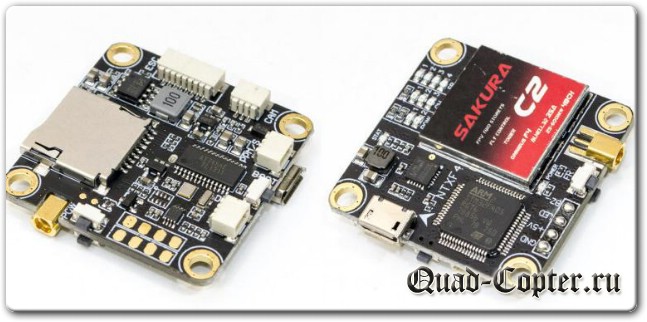
Полетный контроллер
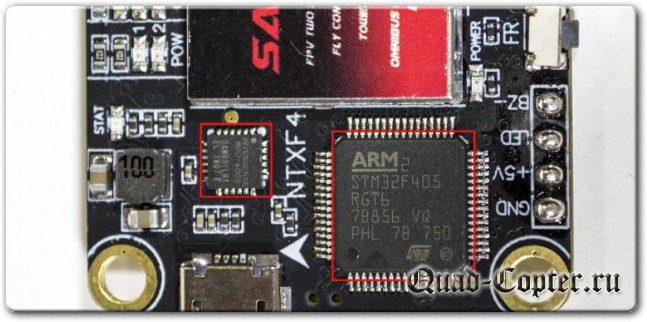
Сразу хочу предупредить, так как на полетный контроллер интегрирован видеопередатчик, подключать его следует только с установленным пигтейлом и подключенной к разъему SMA антенне. В противном случае возможен выход передатчика из строя. Данный ПК (ПК — полетный контроллер) по сути, один из многочисленных клонов OMNIBUS4SD, на который установили видеопередатчик. Подобных решений на торговых площадках Китая просто огромное количество, и данный контроллер известен как – NTXF4-FC. Вот только наклейку сменили, но надпись на плате затереть забыли.
На полетном контроллере применена вполне стандартная для таких изделий связка. Процессор STM32F4 и сенсор MPU-6000.
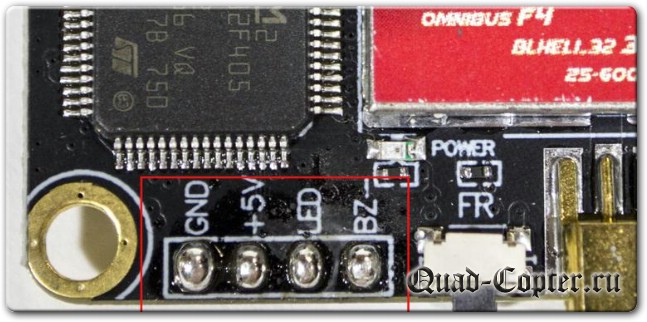
На плате присутствуют контактные площадки для подключения пищалки и габаритной светодиодной подсветки.
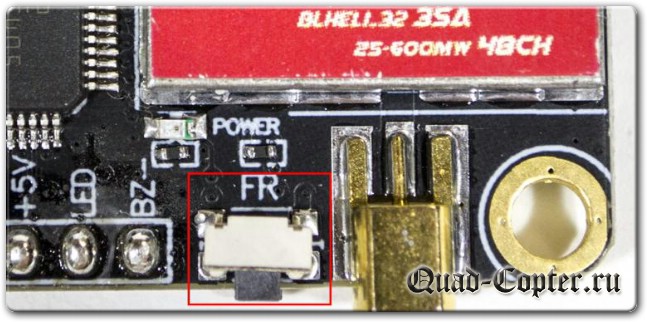
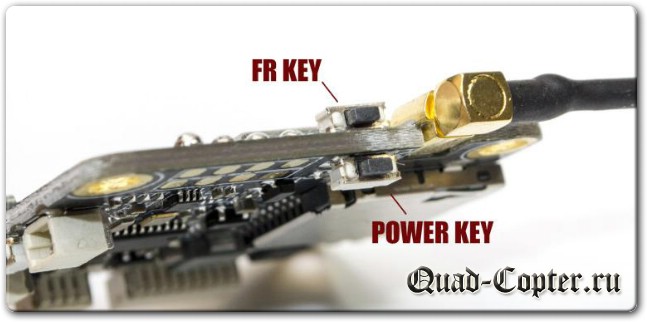
Рядом с антенным разъемом расположены две кнопки управления видеопередатчиком. Кнопка FR переключает частотную сетку и канал, кнопка POW – мощность.
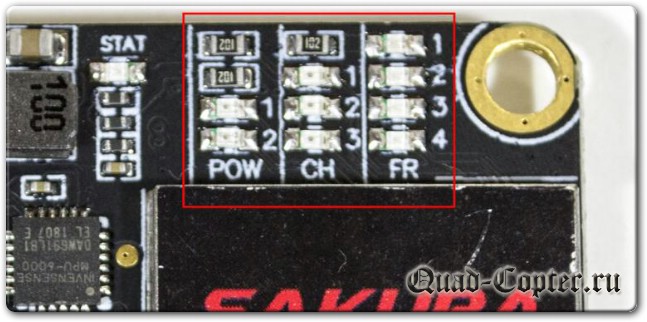
Для индикации установленной частотной сетки, канала и мощности видеопередатчика применены SMD светодиоды, расположенные в трех группах, POW, CH, FR.
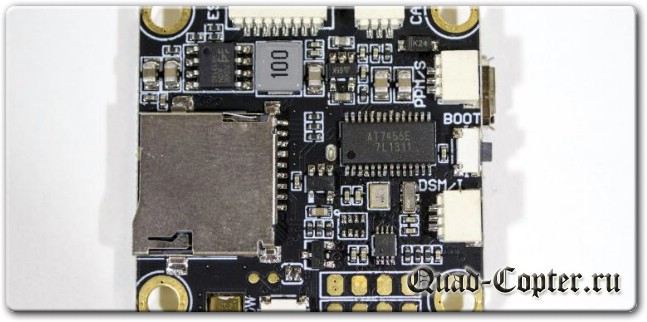
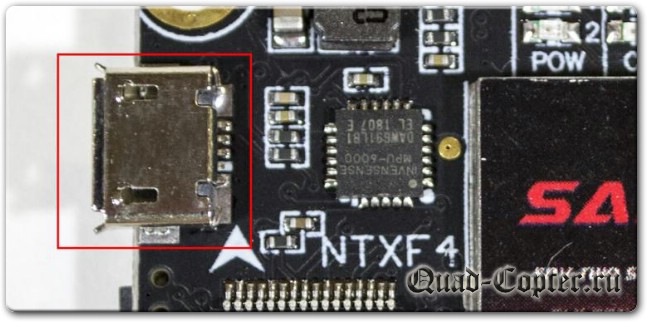
Для подключения к ПК и настройкам в программе betaflight на полетном контроллере установлен порт – micro usb.
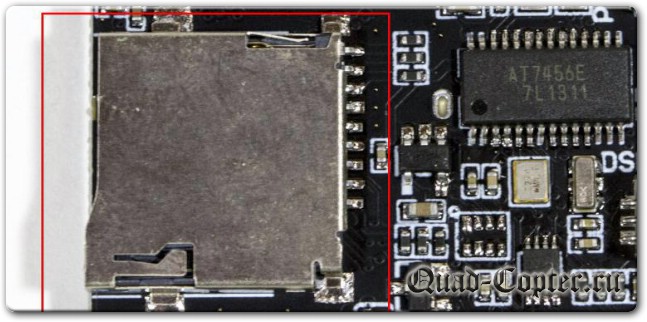
Контроллер оборудован слотом для карточек памяти формата micro sd. При активации логов в прошивке betaflight, становиться доступным запись полетных параметров на карту памяти. Но обычно данной опцией никто не пользуется.
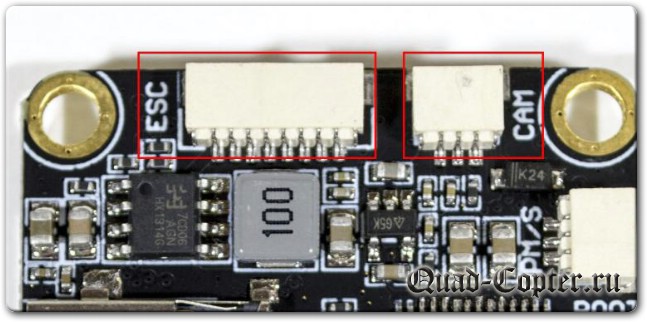
ESC – порт для подключения полетного контроллера к регулятору. САМ – порт для подключения курсовой камеры.
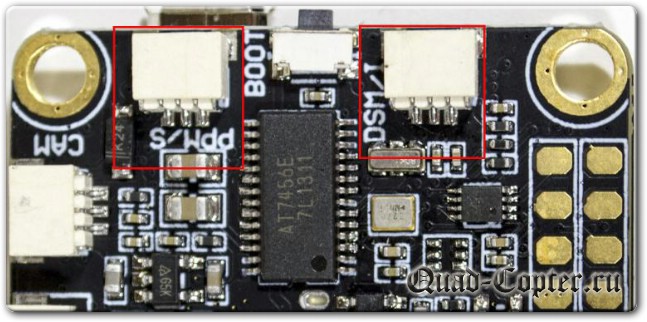
PPS/S – для подключения приемников по шине SBUS. DSM/T – порт для приемников spectrum.
Контактные площадки портов периферии. Эти порты могут управлять дополнительным оборудованием на коптере, например, камерой – Runcam Split.
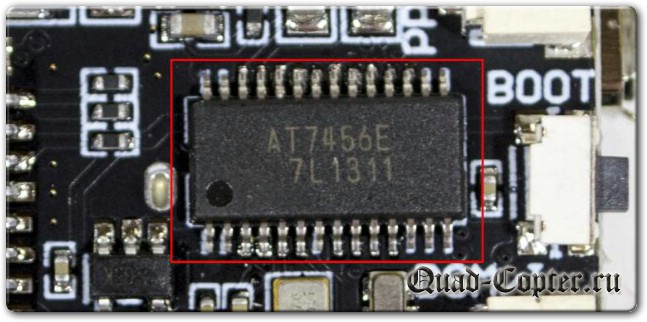
В качестве чипа OSD на данном полетном контроллере применена микросхема AT7456E. Ссылка на даташит.
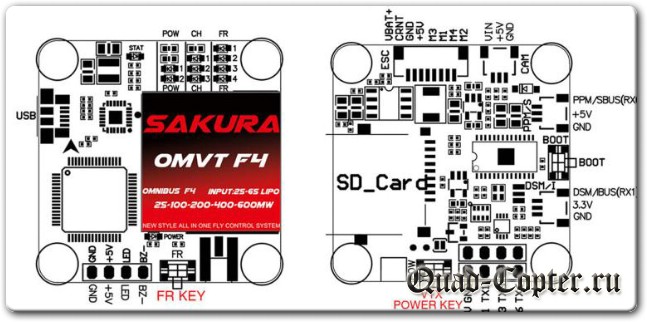
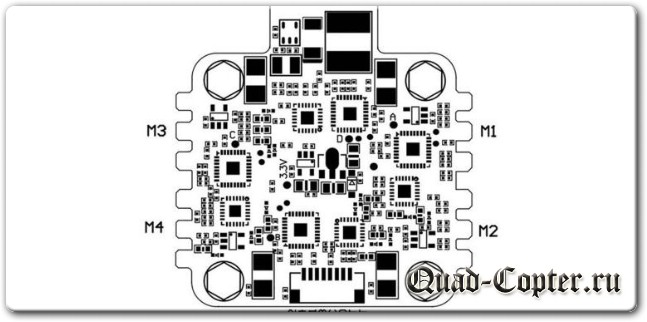
Распиновка полетного контроллера:
Качество пайки и изготовления контроллера на приемлемом уровне, хотя в некоторых местах я наблюдал остатки неотмытого флюса.
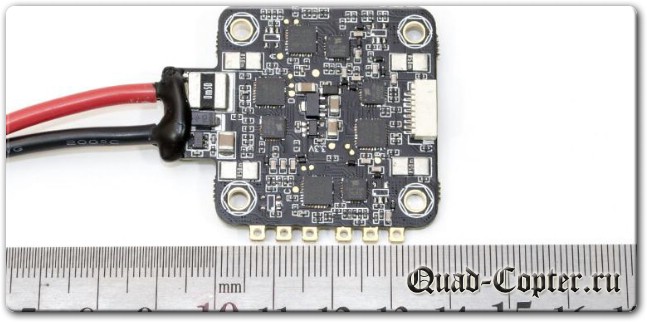
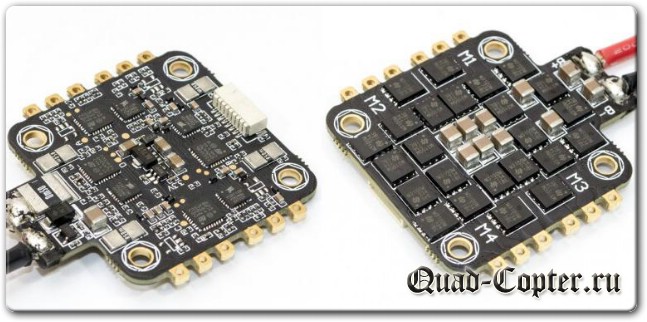
Регулятор оборотов 35A 4in1
Плата регулятора интегрирует в себя четыре 32-х битных регулятора с поддержкой DSHOT1200. К плате регуляторов можно подключать аккумуляторные батареи 3-6S. Пиковый кратковременный ток нагрузки – 45А (10 секунд) для каждого из четырех регуляторов. На плате нет никаких надписей, которые могли бы пролить свет на ее происхождение. На странице товара она значится как – Roptor BLHeli_32 35A ESC.
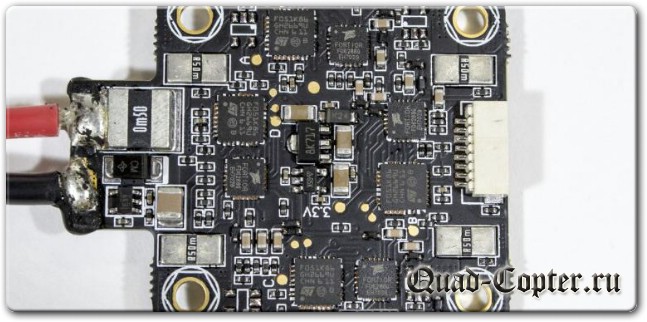
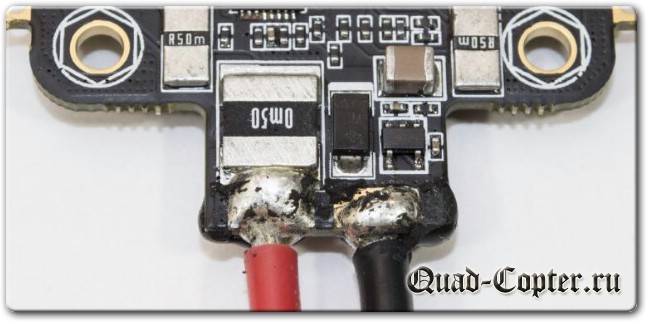
Изначально место пайки питающих проводов было залито черным компаундом. После его снятия под ним оказалась вполне приличная пайка. Если нет необходимости укорачивать провода, можно оставить как есть.
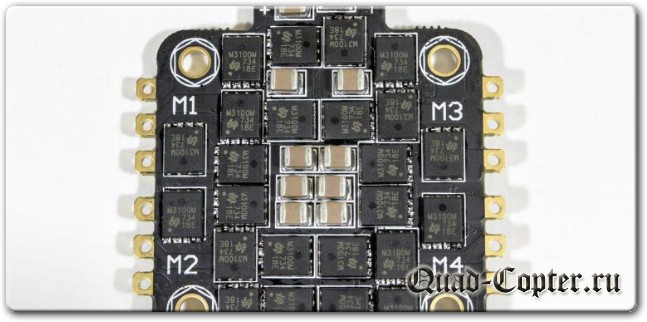
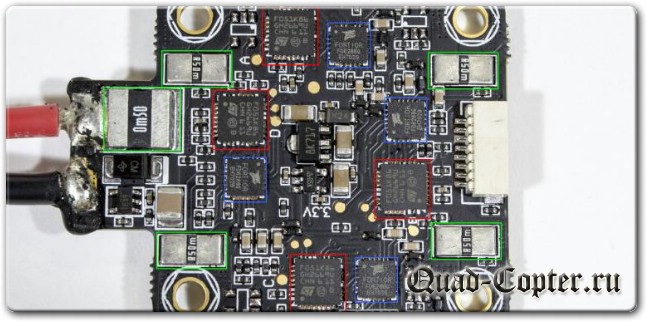
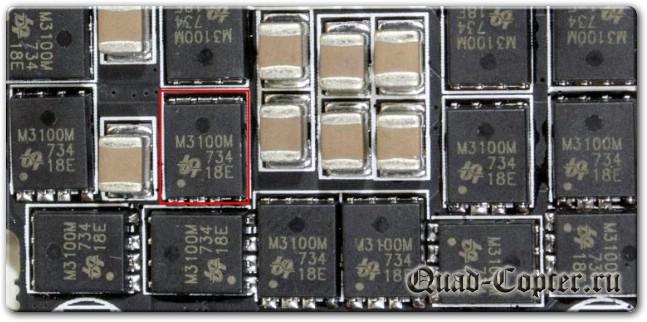
Мозгом регуляторов являются четыре 32-х битных процессора F051k86 – красный контур. В качестве драйверов регуляторов применены четыре FORTIOR fd6288q – синий контур. Зеленым контуром отмечены датчики тока, четыре датчика на каждый из регуляторов и один общий по шине питания.
Силовые мосфеты – M3100M. К сожалению, никакой информации, про них я не нашел. Подозреваю, что они рассчитаны на 30В и пиковые токи около 100А.
Распиновка регулятора:
Качество сборки и пайки регулятора неплохое. Видимых огрехов и дефектов я не обнаружил.
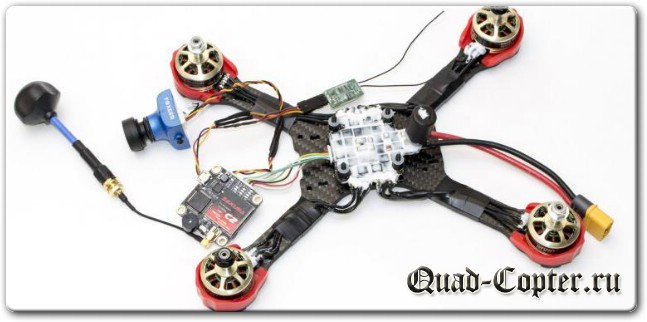
Сборка квадрокоптера
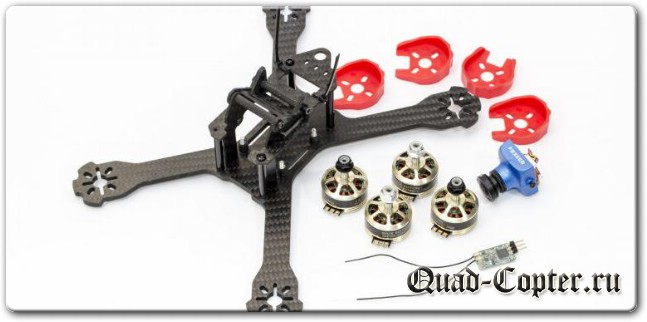
Для сборки квадрика я использовал раму – Realacc XS220. Нижняя часть рамы выполнена из карбона 4,3 мм, все остальные карбоновые элементы толщиной 2,7 мм.
Моторы – DYS SE2205 PRO 2300KV.
Камера – Foxeer HS1177 V2.
Приемник – Frsky XM+ Micro D16 для аппаратуры TARANIS.
Защита моторов (можно не ставить) – KINGKONG Universal Motor Cover Protection.
Ссылки на раму и электронику вы найдете в конце статьи.
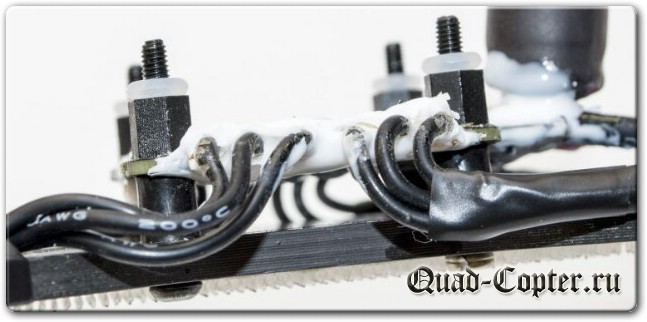
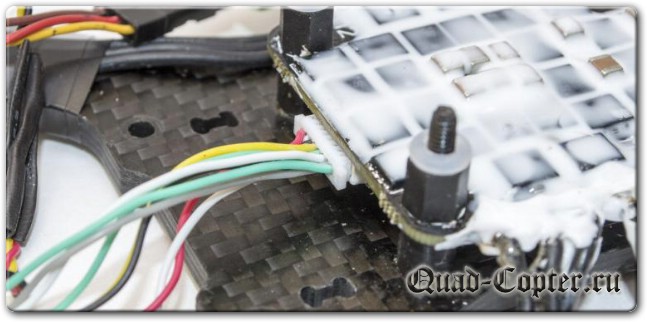
Процесс сборки подобных коптеров абсолютно стандартный. Единственное на чем хочу акцентировать внимание это защита регулятора оборотов от влаги. Это особенно актуально, когда вы летаете там, где есть густая трава и утром на ней скапливается большое количество росы. Падение в такую траву может привести к короткому замыканию и как следствие выгоранию регулятора оборотов.
Для защиты электронных компонентов от влаги я использую 4–5 слоев лака ПЛАСТИК 71, после этого покрываю регуляторы двухкомпонентным силиконовым герметиком К-68.
До начала процесса полимеризации герметик очень текучий, его можно наносить кисточкой. Промазываем герметиком плату регулятора с обеих сторон.
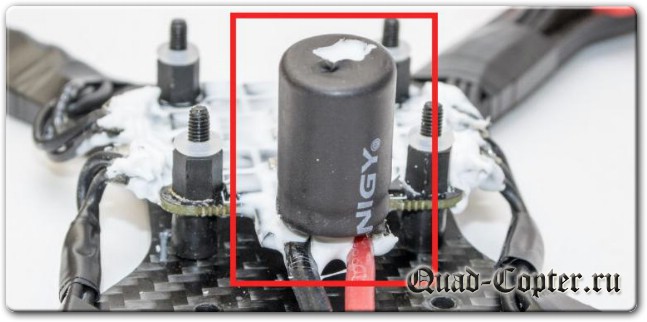
Припаял комплектный конденсатор на 2200µF, и «одел» его в термоусадку.
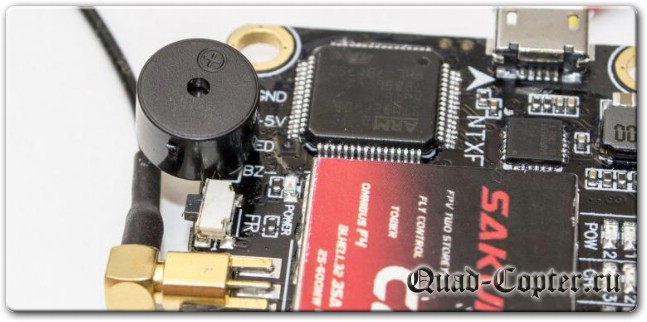
Чтобы не плодить лишних проводов, пищалку припаял непосредственно к контактам на полетном контроллере.
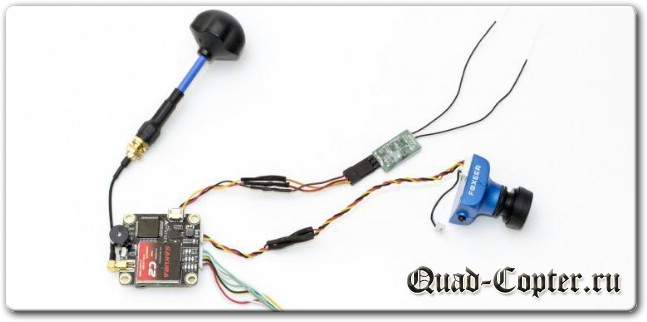
К комплектным шлейфам подключил камеру и передатчик.
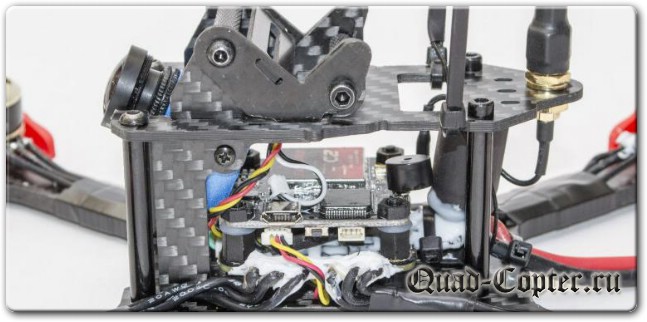
Теперь можно подключать полетный контроллер к регулятору оборотов. Еще раз все проверяем на работоспособность и заканчиваем сборку рамы.
Результат двух часов работы (основное время ушло на сушку лака):
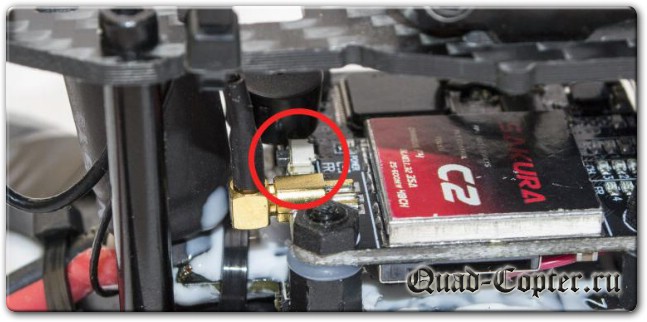
Из за установленного электролита, доступ к кнопкам настройки видеопередатчика затруднен. Эту проблему вполне можно решить, используя обычную спичку.
Настройка
Прошивать полетный контроллер необходимо таргетом – OMNIBUS4SD. По умолчанию контроллер был прошит старой прошивкой 3.2.2 OMNIBUS4SD. Я обновил прошивку до стабильной версии 3.5.0.
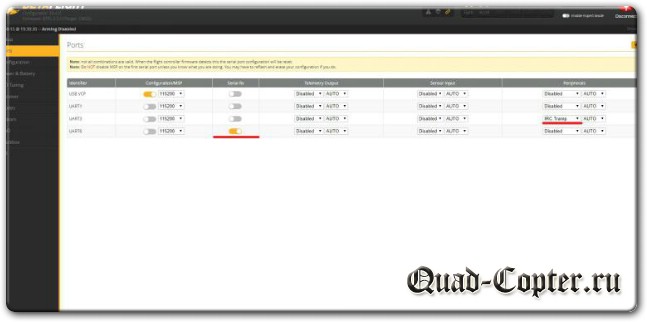
Для работы приемника по шине SBUS активируем Serial RX на UART6. Для UART3 устанавливаем IRC Tramp – удаленное управление настройками передатчика.
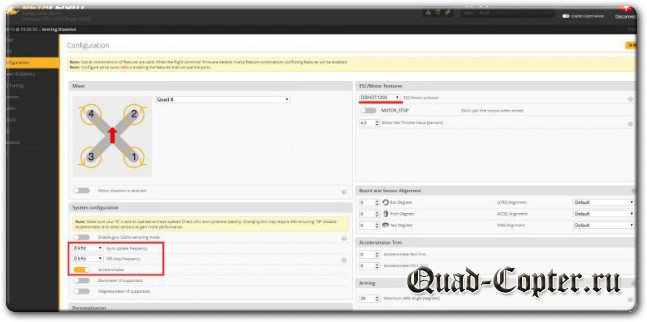
Если нет желания летать в режиме стабилизации, то отключаем акселерометр и устанавливаем максимально возможную частоту работы для процессора полетного контроллера.
Для облета настройки PID регулятора в программе оставил по умолчанию, единственное что добавил немного экспонент на основные каналы управления.
Устанавливаем полетные режимы на ваши любимые переключатели. Естественно, надо настроить ARM (активация коптера).
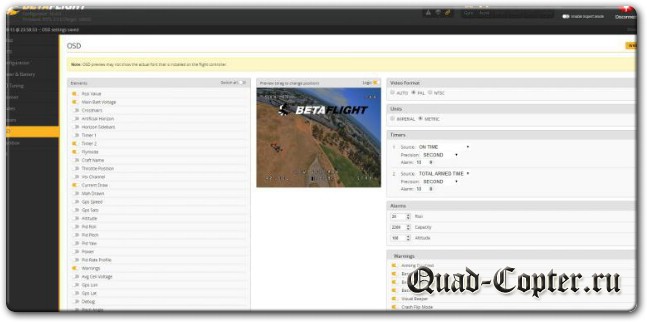
В настройках Betaflight OSD располагаем необходимые нам параметры на экране в соответствии с предпочтениями.
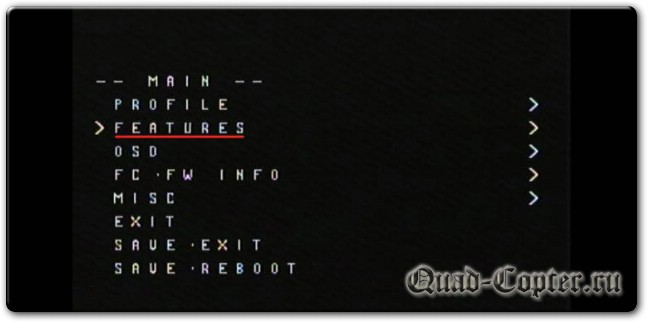
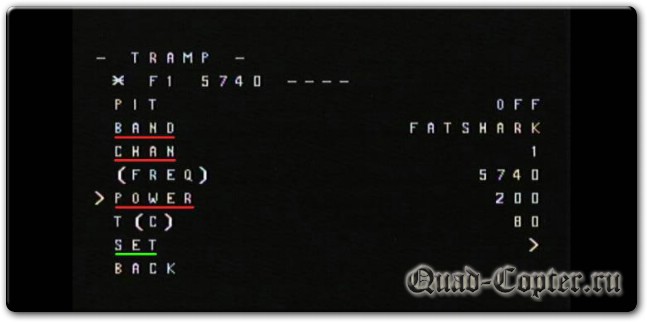
Несколько слов скажу про удаленное управление параметрами видеопередатчика через OSD меню Betaflight. Для входа в меню необходимо дизармить коптер, установить стик газа в положение 50%, стик PITCH вверх (UP), YAW LEFT и мы попадаем в экранное меню Betaflight. Переходим во вкладку FEATURES далее во вкладку UTX TR и оказываемся м меню TRAMP где можем менять частотную сетку, канал и мощность. После изменения настроек необходимо войти в пункт SET и подтвердить изменения YES.
Более наглядно меню управления передатчика продемонстрировано на видео:
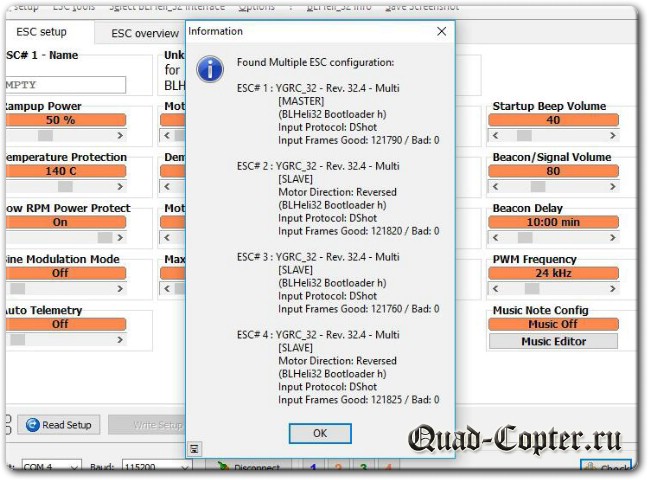
Программа для работы с 32-х битными регуляторами BLHeliSuite 32, нашла четыре регулятора YGRC_32, версия прошивки 32.4.
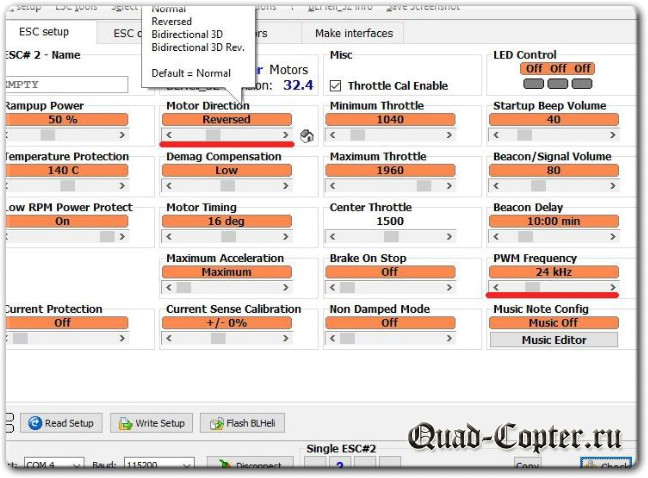
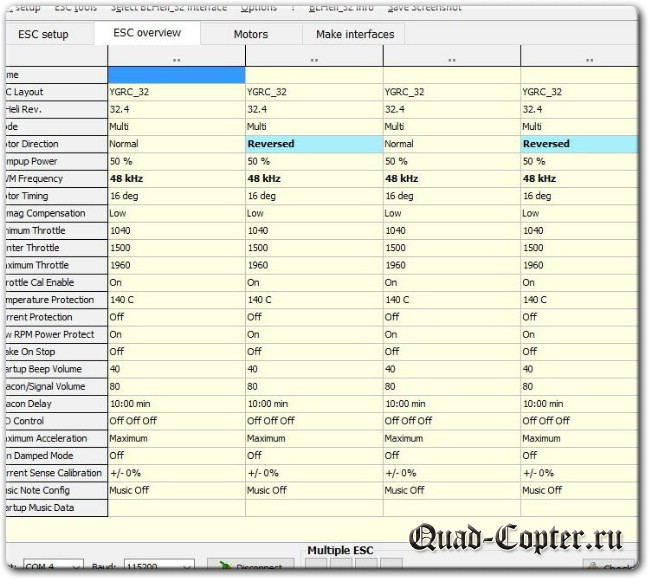
Для правильного вращения мне пришлось реверсировать два мотора, но можно этого и не делать, а поменять местами любые два провода от регулятора к мотору. Параметр PWM Frequency я установил в 48 kHz, это даст более «мягкое» управление электромоторами.
Мои настройки в BLHeliSuite 32:
Полет
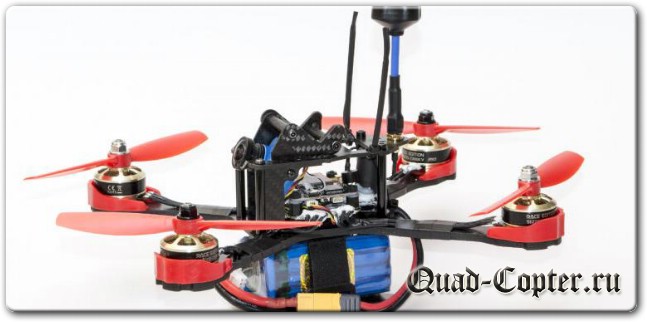
И вот что в итоге получилось. Вес без аккумулятора составил 352 грамм. Аккумуляторы я использовал — Giant Power Dinogy 1300mAh 14.8V 4S 65C. Для «неспешных» полетов самое-то в соотношении цена/качество. Для облета квадрика установил двух лопастные пропеллеры — Kingkong 5045, чтобы не сильно нагружать моторы и регулятор.
На представленном ниже DVR, можно оценить качество видеопередатчика. Передающая антенна – клевер. Антенны на приемнике – клевер и пагода. Но OSD выведены параметры: общий ток; напряжение аккумулятора; мощность; температура платы ПК; положение стика газа. Я был приятно удивлен практически полному отсутствию помех от регулятора при резкой работе стиком газа. Несколько слов про температуру полетного контроллера. При работе видеопередатчика плата очень сильно нагревается, до 70. В полете она обдувается потоком воздуха от пропеллеров и ее температура выше 35 не поднималась. Запись DVR велась на очки Skyzone SKY02S V+.
Квадрик полетел. Не плохо на стоковых настройках. Не судите строго FPV пилот из меня пока так себе, тренируюсь. Ниже приведу видео полета с камеры – xiaomi yi. Летать пришлось в сильный порывистый ветер до 12 м/c, квадрик немного сносило, но в целом результатом я доволен.
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...