Продолжая тему пауэрвупов на раме с диагональю 75мм, с питанием на одну-две банки, хочу поделиться своим мнением о самом мощном представителе этого класса - Eachine Trashcan.
От конкурентов его отличает прочная рама, мощные моторы и высококачественная камера.
Некоторое время производитель не мог придумать название для новой модели, поэтому провел онлайн-конкурс на выбор названия, а победителю подарил этот квадрик. Выиграло название Trashcan, что в переводе означает "мусорная корзина".
Краткие характеристики Eachine Trashcan:
База: 75мм
Вес: 33.95г
Взлетный вес: 49.65г
Моторы: TS0803 15000kV
Пропеллеры: 40мм четырехлопастные под вал 1мм
Полетный контроллер: Eachine CrazyBee F4 Pro
Камера: Caddx EOS2 16:9/NTSC
Передатчик: 40 каналов, 25/100/200мВт
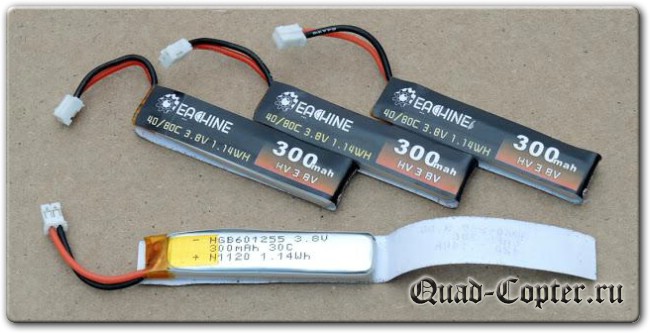
Аккумуляторы: LiHV 300мАч/30C c PH2.0-разъемом, 2шт
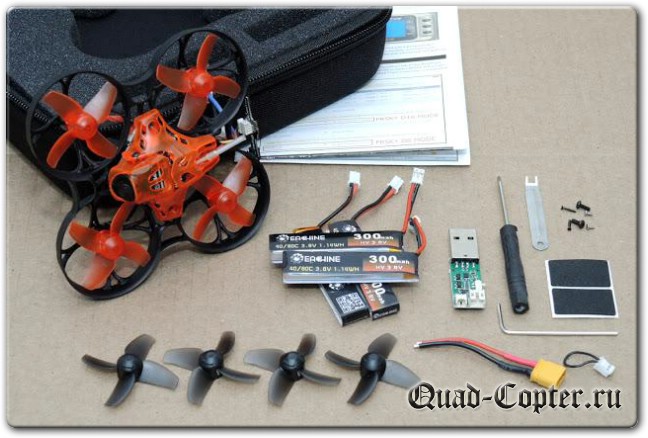
Квадрик приехал в отличном плотном кейсе с внутренней вставкой из пористого материала. В углу была наклейка с версией приемника. Хотелось бы, чтобы такая упаковка стала традиционной для моделей подобного класса:)
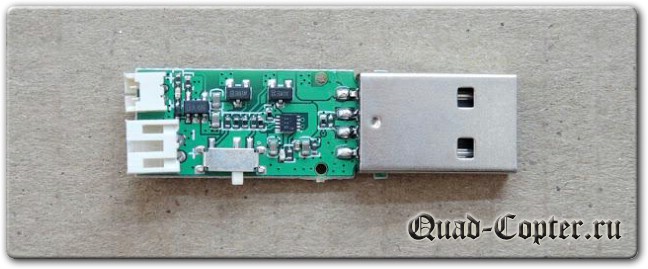
В комплекте были четыре аккумулятора, инструкция, комплект черных пропеллеров, простенький USB-зарядник, запасной силовой провод с XT30-разъемом, перемычка для полетов на одной банке, отвертка, шестигранный ключик, съемник для пропеллеров, набор запасных болтиков и пара липучек.
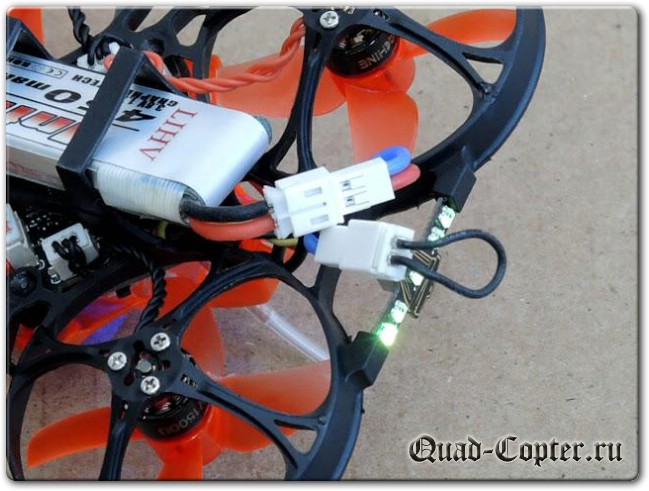
Первое впечатление от квадрика - очень плотный, довольно массивный относительно предыдущих. Сразу же обратила на себя внимание полоска светодиодов со стилизованной мусорной корзиной:)
Eachine Trashcan выглядел бы более компактно, если бы не внушительный по высоте холдер под аккумуляторы. В такой холдер туго входят два аккумулятора на 450мА/ч, которые идеально подходят для полетов на улице или в спортзале.
Угол камеры можно подстраивать, но с этим есть некоторая проблема, о которой ниже. Антенна передатчика свободно поворачивается на 45 градусов в обе стороны - будет меньше шансов сломать ее.
Снизу доступен USB-разъем и кнопки Boot и Bind на полетном контроллере. Силовой провод толщиной 24AWG, два PH2.0-разъема соединены последовательно. Не понравилось то, что антенна приемника расположена снизу, позже переделаю ее на верхнюю сторону полетного контроллера.
Как и у других моделей этого класса, один из силовых разъемом можно замкнуть перемычкой и летать на одной банке. При этом надо подумать, как фиксировать аккумулятор в просторном холдере.
Моторы TS0803 на 15000kV отлично сочетаются с типоразмером модели. На одной банке с этими моторами квадрик летит уверенно, а на двух банках полет уже больше похож на то, как летают взрослые собратья.
Пропеллеры такие же, как на Mobula7, только красного цвета, а в комплекте были еще и идентичные. Вес одного пропеллера 0.8г.
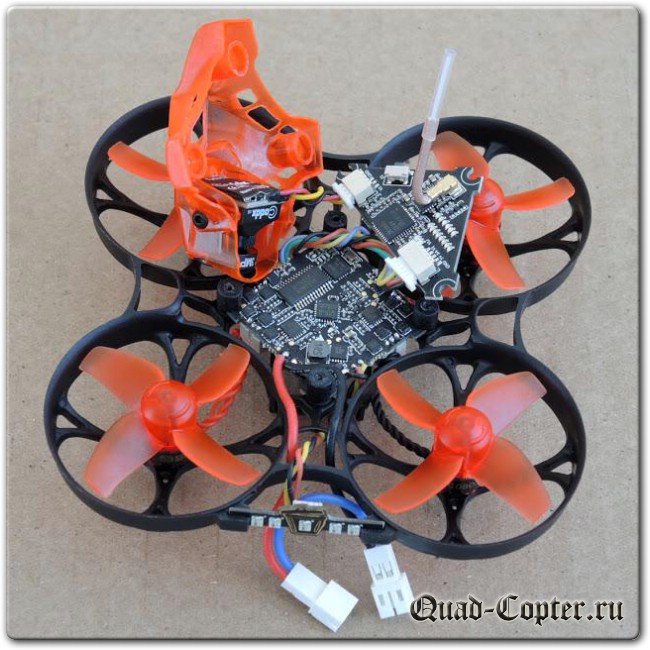
Под канопой, поверх полетного контроллера, стоит передатчик нового формата. Он ни к чему не крепится жестко, просто устанавливается поверх резиновых демпферов и потом прижимается канопой. Вся проводка квадрика выполнена на разъемах, что прилично добавляет вес.
В передней части нет фиксации демпфера полетного контроллера, он просто надет на стойку, а болтик отсутствует.
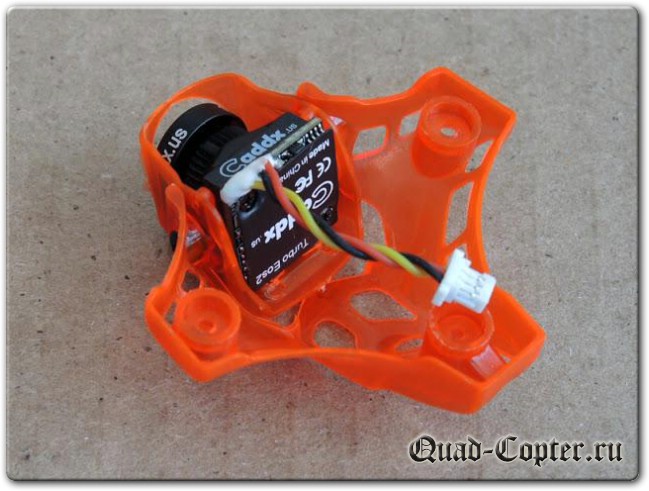
Первое, что сделал - заменил камеру. Изначально квадрик поставляется с камерой Caddx EOS2 с соотношением сторон 16:9 NTSC-формата. У меня очки с соотношением сторон 4:3 и с этой камерой все объекты в них выглядят значительно вытянутыми по вертикали. Все бы ничего, но когда в полете закладываешь вираж, перспектива искажается так, что вестибулярка начинает давать сбои:) Заменил на точно такую же, но с соотношение сторон 4:3 PAL-формата.
Не обошлось без проблем. У стоковой камеры разъем с шагом 1.00мм, у новой камеры разъем был c шагом 1.25мм и обратный:) Пришлось искать и перепаивать разъем на новой камере. Можно было обойтись без пайки, просто используя кабель-переходник 1.00мм-1.25мм, но это добавит немного веса квадрику. Камера и без того тяжеловата, весит 3.4г. Картинка с камеры прекрасна! Хоть и есть небольшие искажения по цвету, зато четкость изображения перекрывает этот недостаток. И, на мой взгляд, угол обзора камеры маловат, хочется немного больше.
Канопа в сборе весит 2.3г, выглядит хрупкой, но пока еще не сломалась:) Есть небольшой нюанс с углом установки камеры. Немного полетав и повстречавшись с препятствиями, заметил, что камера регулярно задирается вверх после аварий. И еще, некоторые пользователи отмечают появление желе на видео. Обе эти проблемы можно решить с помощью демпферов между частями канопы.
Поставил пару маленьких резиновых колечек и камера перестала задираться вверх, а желе на видео и так не было:)
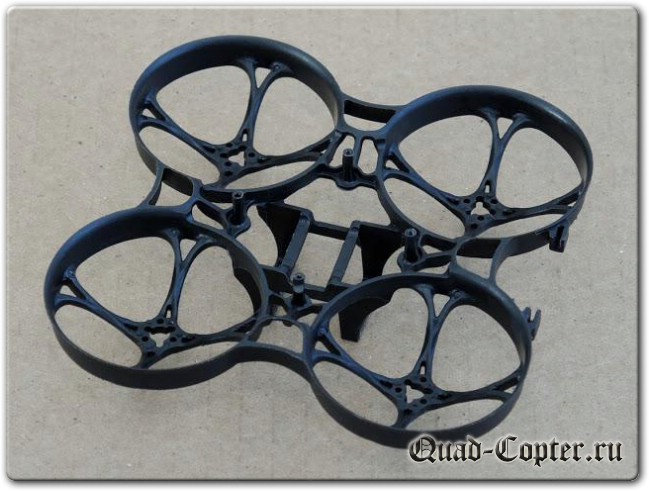
Разобрал квадрик, чтобы оценить вес деталей и немного доработать некоторые нюансы. Рама, как и писал выше, очень жесткая и прочная, но и весит прилично. Получилось 5.55г. Задние светодиоды вставляются в пазы рамы и фиксируются клеем, типа E6000.
Моторы TS0803 на 15000kV весят 2.4г и имеют, на первый взгляд, странную конструкцию. Верхняя опора вала - латунная втулка, а нижняя - подшипник. Основная нагрузка приходится на верхнюю втулку, а цельный кусок латуни сложнее разбить, чем подшипник:) В остальном, моторы типичные, с двумя стопорными кольцами: вверху и внизу, чтобы вал не выезжал из ротора при замене пропеллера.
Легкий ротор со скругленными магнитами будет давать отличный подрыв. Вал рассчитан под пропеллеры с посадочным отверстием диаметром 1мм.
Полоска цветных светодиодов может управляться через BetaFlight, весит 0.4г. Сзади стоит трехпиновый разъем с шагом контактов 1мм. Во время полетов обнаружилась маленькая проблема - выскакивает этот разъем. Пришлось зафиксировать его клеем. Можно настроить светодиоды так, что при выборе частоты работы передатчика, цвет светодиодов менялся. Когда одновременно летает несколько человек, цвет светодиодов будет у всех разный и можно легко определить кто за кем летит по трассе:)
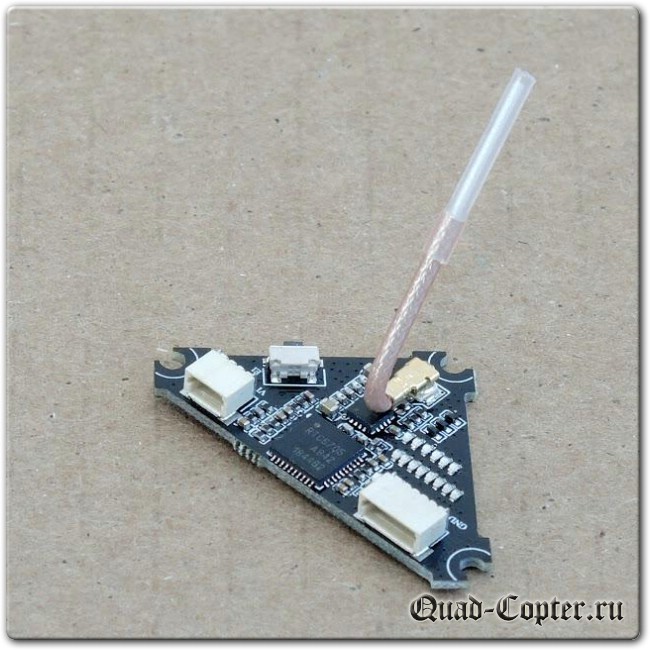
Передатчик квадрика сделан так, что вырезами устанавливается на стойки рамы. Передатчик довольно тяжелый, с антенной весит 2.4г. Антенна отдельно весит 0.35г. На передатчике есть кнопка выбора канала, сетки и мощности. Всем этим можно управлять через OSD квадрика, ибо передатчик соединен с полетным контроллером через SmartAudio.
Мощность передатчика можно задать на 25/100/200мВт. Поддерживается стандартная сетка частот, как в таблице ниже.
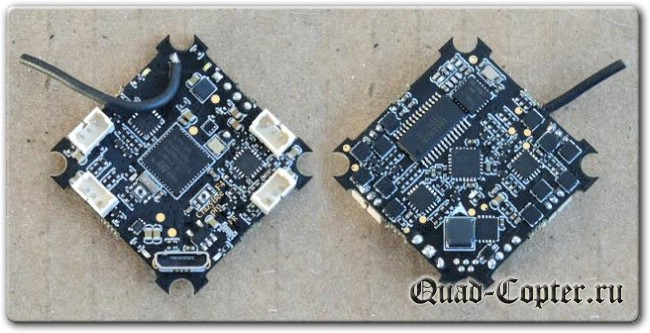
Полетный контроллер Eachine CrazyBee F4 Pro построен на базе F411-процессора с MPU6000-гироскопами. Блок OSD реализован все еще на базе массивной AT7456E, хотя уже есть более компактные решения, например у полетного контроллера BeeBrain Lite. Встроенный приемник реализован на базе чипа CC2500 на SPI-шине для FrSky-версии, для других передатчиков тоже есть варианты. В дополнение ко всему, есть еще и датчик тока.
Блок регуляторов 4-в-1, интегрированный на плату, поддерживает ток до 6А на каждый канал, прошит последней 16.7-версией BLHeli_S с поддержкой DShot600. Плата поддерживает питание как от одной, так и от двух банок. На плате есть выводы под управляемые светодиоды, под пищалку, доступен UART1 (RX1 с инверсией и без нее) и UART2. Можно без проблем подключить любой внешний приемник, если встроенный не устраивает. Полетный контролер без проводов весит 4.25г. А комплект проводов, припаянный к полетному контроллеру, в сумме добавляет еще 1.65г: силовой 1.05г, к передатчику 0.35г, к светодиодам 0.25г.
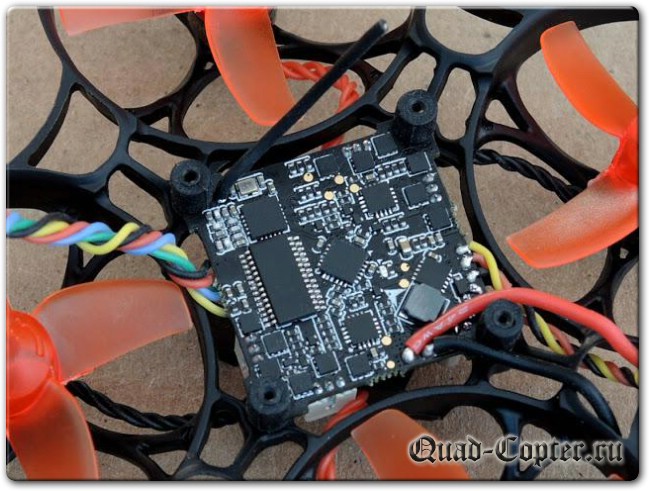
Единственный минус у полетного контроллера - антенна расположена снизу. Не думаю, что это добавит дальности управления, поэтому сразу же перепаял антенну на верхнюю часть платы и заправил под канопу. Заодно перепаял силовые провода, чтобы они не торчали сбоку.
В комплекте было четыре хайвольтных аккумулятора на 300мА/ч. На этикетке указан ток 40/80C, а под этикеткой всего 30C:) Вес каждого аккумулятора 7.85г. На деле аккумуляторы оказались вполне годными, но для этой модели слабоваты. Использовал их на коллекторных тинивупах.
С квадриком было еще и простенькое зарядное устройство, но даже не стал его пробовать. Для начинающих, на первое время оно подойдет, а на будущее стоит присмотреть что-либо более приличное.
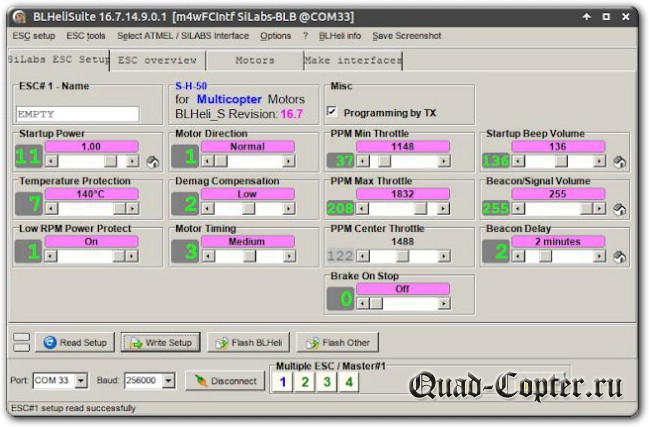
Собрал квадрик и приступил к настройке. Некоторые рекомендации были в официальной документации. Сначала проверил направление вращения каждого мотора через BLHeliSuite. Оказалось, все в порядке. Из настроек только увеличил до максимума громкость писка моторов в режиме маяка и сократил время старта маяка до двух минут.
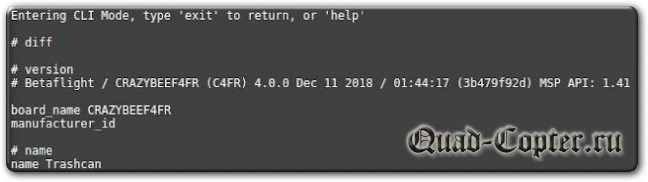
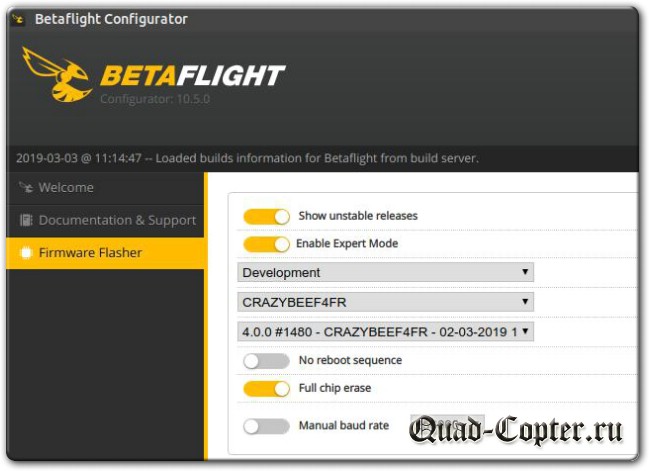
Изначально в полетный контроллер была залита тестовая сборка #1179 BetaFlight для CRAZYBEEF4FR от 13 октября 2018 года, которую не найти в свободном доступе, ибо производитель собирал ее самостоятельно.
Это очень старая версия прошивки, с тех пор многое изменилось, поэтому буду обновлять ее до текущего состояния, предварительно скопировав дефолтные настройки.
Тестовую версию конфигуратора BetaFlight можно взять здесь. Для моей системы есть отдельная сборка, а для других систем надо скачивать версию для chromeos и устанавливать в браузере Chrome, как распакованное расширение.
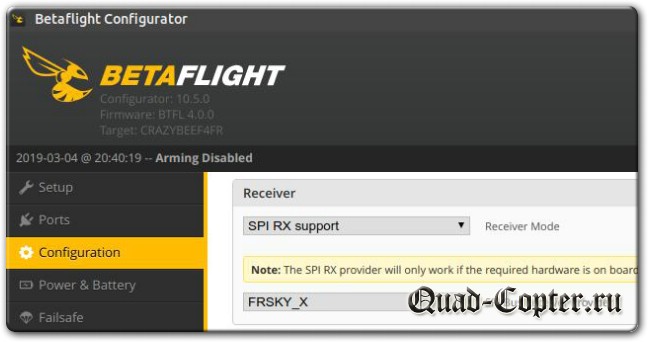
После обновления прошивки, подключаюсь к полетному контроллеру и устанавливаю тип приемника, как FRSKY_X. Попробую протокол D16, вроде в последних сборках исправили его работу.
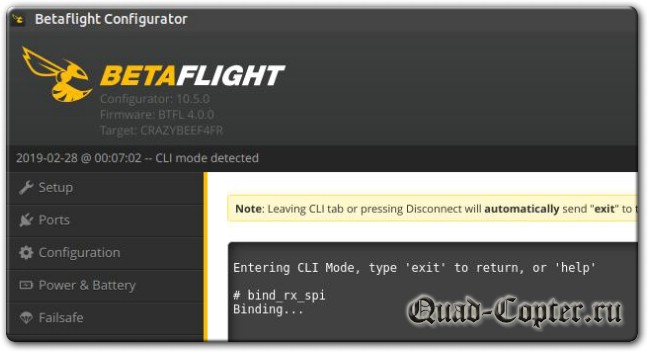
Сохраняю настройки и перехожу в консоль, где ввожу команду bind_rx_spi.
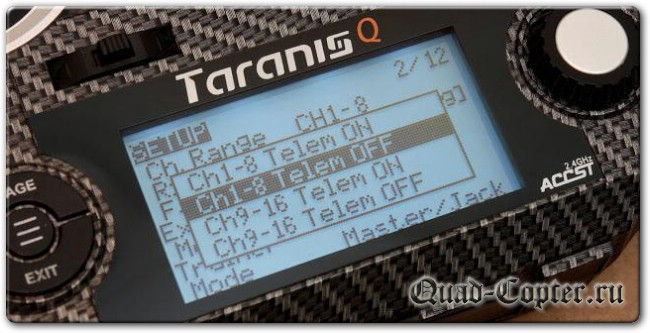
Полетный контроллер переходит в режим сопряжения. В пульте так же выбираю режим D16, но на 8 каналов и без телеметрии. Данные RSSI в этом режиме все равно будут приходить, а для подстройки квадрика и OSD хватит.
Через несколько секунд все готово, на вкладке приемника в конфигураторе появилась активность от работы стиками:)
Настройки Eachine Trashcan
Потом был продолжительный процесс подбора параметров. Сначала разобрался с динамическими фильтрами по совету друга. Потом подобрал расходы и PID-ы. Полетел квадрик очень даже знатно! Отключил фильтрацию входящего сигнала и из-за этого параметр FF в PID-ах стал неактуален. Светодиоды настроил так, чтобы цвет менялся в зависимости от частоты работы передатчика. Не буду заваливать статью скриншотами, просто приведу свои настройки.
# diff all
# version
# Betaflight / CRAZYBEEF4FR (C4FR) 4.0.0 Mar 4 2019 / 10:49:38 (0af5c29e8) MSP API: 1.41
# reset configuration to default settings
defaults nosave
# led
led 0 0,0::COV:7
led 1 1,0::CV:7
led 2 2,0::CIW:7
led 3 3,0::CV:7
led 4 4,0::CV:7
# aux
aux 0 0 0 1900 2100 0 0
aux 1 1 2 1900 2100 0 0
aux 2 13 1 1400 1600 0 0
aux 3 28 0 1900 2100 0 0
aux 4 35 1 1900 2100 0 0
aux 5 47 2 1400 1600 0 0
# adjrange
adjrange 0 0 3 900 2100 12 3 0 0
# master
set gyro_lowpass_type = PT1
set gyro_lowpass_hz = 110
set dyn_notch_range = HIGH
set dyn_notch_min_hz = 250
set dyn_lpf_gyro_max_hz = 885
set rc_interp = OFF
set rc_smoothing_type = INTERPOLATION
set blackbox_device = NONE
set dshot_idle_value = 600
set motor_pwm_protocol = DSHOT600
set vbat_max_cell_voltage = 450
set vbat_min_cell_voltage = 290
set vbat_warning_cell_voltage = 310
set ibata_scale = 1175
set beeper_dshot_beacon_tone = 4
set yaw_motors_reversed = ON
set small_angle = 180
set pid_process_denom = 1
set osd_cap_alarm = 450
set osd_tim1 = 1792
set osd_tim2 = 1025
set osd_vbat_pos = 14785
set osd_rssi_pos = 14394
set osd_tim_2_pos = 14807
set osd_throttle_pos = 6603
set osd_current_pos = 4513
set osd_mah_drawn_pos = 4536
set osd_motor_diag_pos = 396
set osd_craft_name_pos = 6177
set osd_display_name_pos = 33
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set vtx_band = 5
set vtx_channel = 7
set vtx_freq = 5880
set vcd_video_system = PAL
set frsky_spi_tx_id = 63,30
set frsky_spi_offset = -46
set frsky_spi_bind_hop_data = 5,83,163,8,88,168,13,93,173,18,98,178,23,103,183,28,108,188,33,113,193,38,118,198,43,123,203,48,128,208,53,135,213,58,138,218,63,143,223,68,148,228,73,153,233,78,158,0,0,0
set frsky_x_rx_num = 1
# profile
profile 0
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 250
set vbat_pid_gain = ON
set feedforward_transition = 50
set pidsum_limit = 700
set pidsum_limit_yaw = 600
set throttle_boost = 0
set acro_trainer_angle_limit = 15
set p_pitch = 80
set i_pitch = 85
set d_pitch = 25
set f_pitch = 0
set p_roll = 80
set i_roll = 85
set d_roll = 25
set f_roll = 0
set p_yaw = 70
set i_yaw = 80
set d_yaw = 5
set f_yaw = 0
set angle_level_strength = 20
set horizon_level_strength = 40
# restore original profile selection
profile 0
# rateprofile
rateprofile 0
set yaw_rc_rate = 110
set roll_expo = 20
set pitch_expo = 20
set yaw_expo = 5
set roll_srate = 75
set pitch_srate = 75
# rateprofile
rateprofile 1
set roll_rc_rate = 80
set pitch_rc_rate = 80
set yaw_rc_rate = 110
set roll_expo = 15
set pitch_expo = 15
set yaw_expo = 5
set roll_srate = 80
set pitch_srate = 80
# rateprofile
rateprofile 2
set roll_rc_rate = 65
set pitch_rc_rate = 65
set yaw_rc_rate = 110
set roll_expo = 10
set pitch_expo = 10
set yaw_expo = 5
set roll_srate = 84
set pitch_srate = 84
# restore original rateprofile selection
rateprofile 0
# save configuration
save
Отзывы на Eachine Trashcan
Полетал некоторое время, проблем с зависанием полетного контроллера из-за D16-режима приемника больше не наблюдается. Честно признаюсь, со стоковыми аккумуляторами летать и не пытался, слабоваты они для такого аппарата по всем параметрам. Летал только с аккумуляторами на 450мА/ч, как на одной, так и на двух банках.
На одной банке время полета получилось 4 минуты по квартире, на двух банках - 5 минут на улице спокойного полета или 3.5-4 минуты, если знатно наваливать. В помещении на Eachine Trashcan летать можно, но он все же тяжеловат, заносит его на поворотах с одной банкой, хотя под стульями по комнате ползал без проблем, только когда по коридору газ топнешь, потом тормозить надо заранее:) На двух банках в помещении летать - это жесть! По динамике квадрик недалеко ушел от взрослых собратьев.
Чтобы удержать высоту, приходится газом играть очень аккуратно. Есть вариант поджать кривую газа сверху, но все равно для квартиры 60 грамм полетного веса (квадрик + два аккумулятора на 450мА/ч) многовато - можно много разрушений сделать:) Так что две банки - чисто уличный вариант или спортзал. Вот там потенциал Eachine Trashcan раскроется по полной! Можно летать где хочешь и как хочешь и все это относительно безопасно для окружающих. Квадрик вот прям очень понравился, однозначный победитель своего класса.
Особенно хочу отметить раму квадрика. Убить ее довольно сложно, но можно! Для этого надо хорошенько разогнаться на выходе из петли, поймать порыв ветра и со всей дури влететь, например, в железные перила! Да так, чтобы искры брызнули и аккумуляторы в радиусе пяти метров раскидало! Тогда сломается одно переднее крепление кольца защиты, что и случилось у друга, который все это проделал:)
Кстати, крайне не понравились силовые разъемы. Сначала испытывали квадрик друга и несколько раз он падал с отключением по питанию. Подергаешь разъем - заведется. Уже думал, что силовые провода надорвались, ан нет. Когда приехал мой экземпляр, то в первый же день поймал такую же проблему. В общем, меняйте силовые разъемы либо на вариант с цельным пинами, либо на XT30, хоть он и тяжеловат.
В моем регионе будет не менее пяти таких квадриков и три из них - в моем городе. Можно будет на любой лужайке гонки устраивать! Типа, потрешканимся на выходных?:)
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...