Как я разбил новый квадрокоптер
|
Автор
 |
Опубликовано: 3721 день назад (15 ноября 2014)
Блог: Полеты на квадрокоптере
Рубрика: Падения квадрокоптеров
Редактировалось: 1 раз — 22 ноября 2014
|
+2↑ Голосов: 2 |

Эффект Даннинга-Крюгера — это искажение, которое заключается в ошибочной переоценке собственных возможностей неподготовленным индивидом при выполнении какой-то задачи. К чему я это? Просто пару минут поигравшись с квадрокоптером DJI Phantom 2 Vision+, похоже, я стал ходячим воплощением такого эффекта.
«Ну это же так просто!» — я запустил в свободный полет довольно дорогую и полученную от DJI под честное слово железку. «И так круто!» — я зажал левый стик, и коптер взмыл ракетой к небесам, с легкостью набрав высоту в три десятка метров. Светодиоды радостно подмигивали пока я неторопливо разворачивал дрон и изучал окрестности. После очередного поворота даже увидел самого себя с высоты птичьего полета прямо на экране смартфона в формате 1080p.
Конечно же, захотелось побыстрее сохранить это видео и куда-нибудь его выложить – ну знаете, что-то вроде «управлять дроном проще простого, даже для новичка!».
Коптер как раз покачивался вперед-назад и пытался стабилизироваться когда я отправил его на посадку. Вдруг машинку порывом ветра понесло прямо к деревьям во дворе, тут-то я и замер. Молнией ударило понимание всей собственной глупости – запустить дрон в первый раз и сразу при сильном ветре, да еще и рядом с деревьями! И все же я постарался спасти железку, судорожно отклонив правый стик назад. Стоп, надо же наоборот вперед, ведь коптер как раз был развернут когда его начало сносить! А, черт, теперь-то куда…?!
За какую-то секунду, растянувшуюся для меня на годы, я увидел как квадрокоптер с жужжанием шинкует листья на ветвях, потом пропеллеры замирают и гаджет ценой более 50 тысяч рублей коршуном летит к земле и разбивается о тротуар. Аккумулятор в одну сторону, камера – в другую… Так мы и замерли – я с пультом в руках, и коптер с батареей в паре метров.
За некоторое время до инцидента
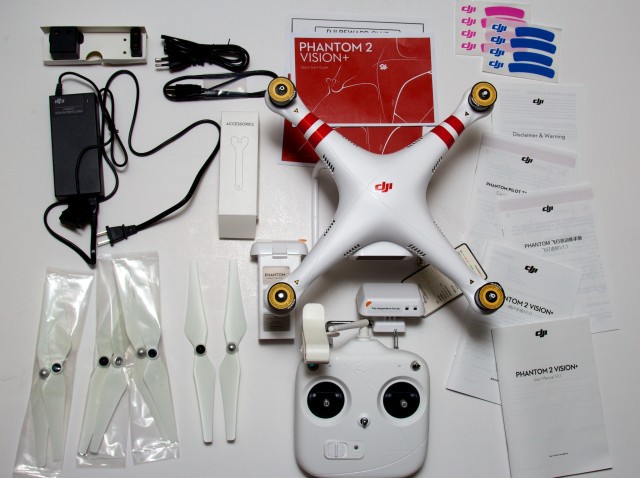
Прежде чем мы узнаем что было дальше, не говоря уж о том, что даже главному редактору надо сначала читать инструкции, уделим некоторое время самому квадрокоптеру.
DJI Phantom 2 Vision+ — это обновленная версия оригинальной модели Vision. Все тот же работающий с GPS 4-роторный квадрокоптер, но правильнее называть его дроном благодаря возможности полуавтоматического пилотирования. Хотя другие дроны семейства Phantom 2 могут вести полностью автоматический полет по заранее запрограммированному маршруту (по заверению производителя, наш коптер в скором времени тоже получит аналогичное обновление прошивки).
Немного характеристик:
Тип 4-роторный квадрокоптер
Вес 1180г
Длина по диагонали 350мм
Двигатели 4x 920KV BLDC
Макс. горизонтальная скорость 15м/с
Макс. вертикальная скорость подъем 6м/с, снижение 2м/с
Заявленное время полета 25мин
Частоты управления 5.728ГГц-5.8ГГц
Частоты видеотрансляции 2412-2462МГц
Емкость аккумулятора 5200мАч
Камера 14МП 140° FOV (f/2.8), на стабилизирующем подвесе
Цена 59 990р
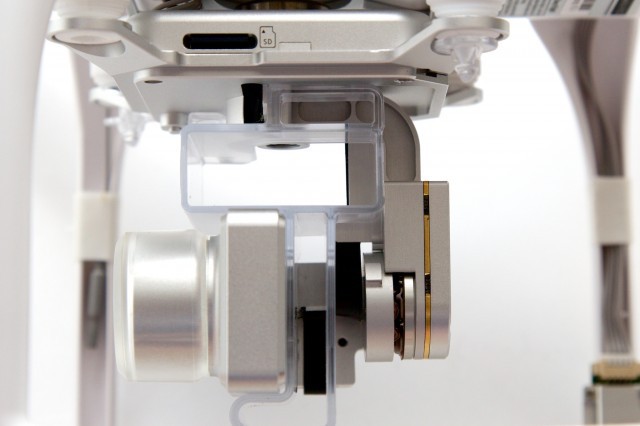
Конечно, основная фишка Vision+ во встроенной камере, установленной на стабилизирующем трех-осевом подвесе. Во время полета стабилизатор позволяет неподвижно держать камеру при колебаниях самого коптера. Также, «небесное око» можно вращать и наклонять с земли при использовании приложения DJI Vision (доступно для iOS и Android).

Как и предшественники Phantom 2 и Phantom 2 Vision, наш дрон использует GPS для определения позиции, высоты и ускорения. При каждом включении коптер выполняет самодиагностику и привязку к спутникам. Как только он поймает достаточное их количество, станет доступен полет в полуавтоматическом GPS-режиме. Несмотря на наличие других вариантов, именно базовый GPS-mode будет интересен в первую очередь, так как позволяет просто отдать команду “прямо”, и дрон сам решит как и в какую сторону надо двигаться. Кстати, оставленный без управления коптер будет парить в виртуальном “кубе” со стороной 2м, компенсируя порывы ветра и прочие погодные особенности. За пару часов полета мы лишь пару раз замечали что дрон немного вылез из своего «кубика безопасности», что, по всей видимости, было вызвано проблемами калибровки встроенного компаса.

Для управления гаджетом используется вполне привычный пульт с двумя стиками. Со свежим комплектом батареек и без явных препятствий сигналу, его силы достаточно чтобы управлять коптером в радиусе ~300м (по крайней мере, у нас получалось). Видео при этом транслируется по отдельному каналу через специальный трансивер на пульте. Этот же трансивер отвечает за создание отдельной Wi-Fi сети для смартфона, после чего видео можно смотреть через приложение DJI. Возможно, выглядит это кривовато, но на практике все работает прекрасно – можно даже управлять дроном с помощью камеры если вы потеряли его из поля зрения. Кроме видео, будут доступны данные о расстоянии, скорости и высоте полета гаджета. Камеру можно наклонять кнопками в приложении, либо воспользоваться акселерометром смартфона; а вот для ее разворота придется поворачивать весь коптер.
Кстати о приложении. В версии для iOS явно были проигнорированы стандарты дизайна платформы и вместо них использован неуклюжий интерфейс собственной разработки DJI. Не то чтобы он сильно мешал управлять агрегатом, но сделан явно инженерами без понимания как действительно должен выглядеть интерфейс.


Тем не менее, приложение вполне работоспособное и позволяет делать снимки, снимать видео и изменять базовые параметры изображения, вроде экспозиции и баланса белого. Для хранения видеопотока в коптере предусмотрена SD карта на 4 ГБ, но никто не мешает поставить и более емкую. Камера снимает в разрешении 1080p (фото и видео); фотографии по качеству сравнимы со средним смартфоном, а вот видео получается чуть хуже. Конечно, ролик получится не как у GoPro, но полетать по окрестностям и оглядеться – более чем достаточно.
Но прелесть нового коптера в сравнении с прошлым Vision не столько в самой камере, сколько в трех-осевом встроенном стабилизаторе. И вот здесь уже отличие налицо: камера неподвижна на протяжении всего полета, а видео получается на выходе ну прямо плавное-плавное. В принципе, можно попробовать улучшить картинку если соединить шасси от Phantom 2 с камерой GoPro и отдельным стабилизатором. Видео станет получше, но вы не получите того же уровня интеграции с ПО коптера: к примеру, Vision+ передает «по воздуху» живое видео и данные телеметрии, а при самосборной конструкции все это придется реализовывать как-то иначе.


Новый Vision+ вполне можно рассматривать как полноценную альтернативу самосборным квадрокоптерам. Я как-то присутствовал на встрече фанатов таких дронов и у большинства участников на руках были собранные вручную коптеры разной степени сложности. Несколько человек демонстрировали довольно сложные агрегаты на Arduino, с передачей видео и прочими штуками, но ни один такой вариант не предложит вам идеологию «распаковал-включил-работает» как у Vision+. Естественно, за простоту и готовность к работе приходится чем-то расплачиваться: коптер самостоятельной сборки может обойтись до 10т.р, в то время как детище DJI стоит 59 990р. Но на то оно и удобство, чтобы за него приходилось платить.
Полет без последствий
Так чем же закончился инцидент с разбиванием коптера? Хорошие новости — Phantom 2 Vision+ по прочности вполне можно назвать летающим танком. Ну, по крайней мере, большую его часть. Авария полностью уничтожила камеру и стабилизатор, но я их просто вынул и тем же вечером коптер осторожно поднялся в воздух снова. Гораздо тяжелее мне далось письмо Майку Перри из DJI, где я рассказал что разбил дорогую железку. К счастью, команда DJI перенесла новость совершенно спокойно и мне просто выслали новый коптер.
Конечно, с новым экземпляром я был гораздо более аккуратен. В итоге вышло, что управлять дроном действительно не сложно — нужна лишь некоторая практика и побольше открытого пространства.
Взглянем на управление. Левый стик на пульте отвечает за набор высоты и рыскание: ускоряемсязамедляемся наклоном его вперед или назад, поворачиваем при отклонении стика влево или вправо. Правый контролирует движение вперед-назад и наклон влево-вправо. Симметричность коптера в первые часы заставила меня много думать что именно я хочу сделать и как, ведь не всегда понятно куда он реально смотрит. Помогло медленное использование за раз только одной из осей на стиках, а чуть позже уверенности прибавилось и стали получаться уже более сложные маневры вроде поворота в движении.

Но первые 10 сессий все равно прошли на нервах. Каждый раз, когда дрон разворачивался, приходилось секунд 5 обдумывать какие телодвижения на пульте надо совершить чтобы направить его в нужном направлении. Зато мне очень понравилось изучать окрестности в движении, тем более что заявленная горизонтальная скорость может достигать 15м/с. Я конечно ускорение не замерял, но точно могу сказать что летает он гораздо быстрее чем я бегаю. Опять же, первое время я старался не отпускать железку дальше пары метров — боязнь повредить еще и второй экземпляр сделает очень осторожным кого угодно.

Через какое-то время с управлением я освоился и стал отпускать коптер в более свободный полет. И хотя осторожность все равно никуда не делась, но совершенно невозможно было удержаться от полетов на максимальной скорости в открытом поле, прохода на бреющем полете над водой, или зависания в паре сотен метров над землей с просмотром захватывающего дух видео! Коптер очень верткий и шустрый, на пульт реагирует просто мгновенно – опытный пилот наверняка смог бы продемонстрировать с ним какие-нибудь классные трюки.
Кстати, встроенный GPS – настоящий друг новичка. Если вдруг запаникуете – просто отпустите стики и автоматика сама остановит дрон, выровняет его и оставит неподвижно парить в воздухе. Если не пытаться загнать коптер в здание, к ЛЭП или на дерево, то в GPS-режиме его не так-то просто убить.
ATTI, блокировки курса, и самостоятельный возврат на базу
На небольшой высоте можно без проблем управлять дроном самостоятельно, главное следить за индикаторами направления. Но хорошая скорость коптера вместе с длиной «радио-поводка» способствуют экспериментам с дальностью и высотой, а значит в какой-то момент можно запросто потерять железку из виду. И тогда выбор невелик: или положиться на обрастающую помехами от дальности картинку с камеры, или сдаться и призвать коптер обратно.
Прямо из коробки дрон настроен на так называемый «фантомный режим», который прячет его расширенные полетные возможности. И если вы новичок в квадро-пилотировании, но полетать и осмотреться хочется уже сейчас – это именно то, что нужно. Включил и полетел, а если что-то пойдет не так и вы упустите коптер из виду – просто выключаем пульт и дрон сам возвращается. Он поднимется на высоту около 18м и по GPS медленно вернется в точку где был включен, после чего плавно приземлится.
Если хочется больше драйва – с помощью PCMac приложения и кабеля USB можно включить NAZA mode, который задействует дополнительные переключатели на верхней части пульта.
Первый переключатель S1 таким образом становится выбором между режимами GPSATTI. И вот как раз ATTI добавляет дрону драйва, повышая маневренность и отключая некоторые подушки безопасности. Нижняя позиция переключателя позволяет выбрать режим автоматического возврата (тогда не нужно будет отключать пульт) или же полностью ручное управление.
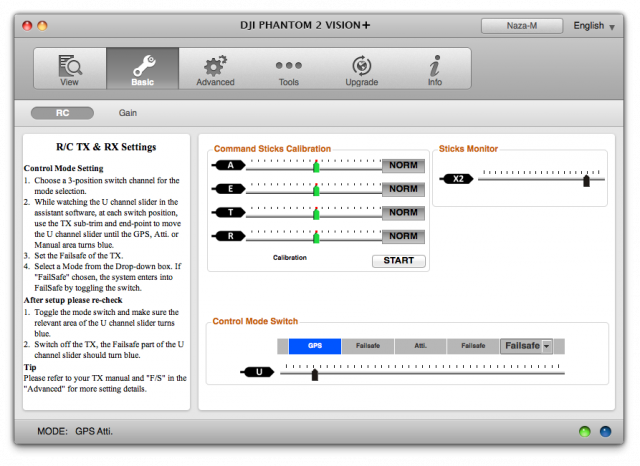
Обычно опция ручного режима вызывает повышенный интерес пилота, но постарайтесь все же не использовать ее пока не накопите достаточно опыта. В этом варианте у дрона нет ни GPS-ограничителей, ни авто регулировки высоты, ни чего-то другого умного и автоматического. Агрегат способен вытворять немыслимые зигзаги под пальцами опытного пилота, или же перевернуться пропеллерами вниз и коршуном рвануть к земле… Лучше пока ограничиться опцией автоматического возврата.
Переключатель S2 слева также получает новые возможности. В положении «вверх» дрон летает обычным образом, а если перевести вверх оба переключателя, то поведение коптера будет неотличимо от заводского фантомного режима. Перевод S2 в среднее положение активирует блокировку курса.
Блокировка курса меняет восприятие дроном направлений вперед, назад, вправо и влево с относительных на абсолютные. Например, нажатие вперед левого стика отправит дрон не по направлению его текущей ориентации, а туда, куда он был направлен при первичной калибровке GPS.
Так как камеру можно повернуть только разворотом всего дрона, режим курсовой блокировки может здорово пригодится если нужно вести съемку на скорости с поворотом камеры. Например, так можно получить видео движущейся машины как в новостях с полицейского вертолета.
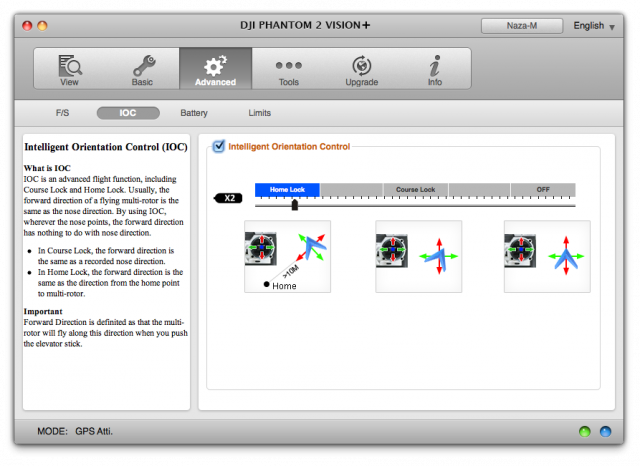
Нижнее положение S2 будет, пожалуй, самым полезным – это home lock. Режим во многом похож на курсовую блокировку, но привязка идет уже к точке первичной GPS-привязки. То есть где бы ни находился коптер, «назад» для него всегда будет по направлению к дому.
Такой режим очень полезен если коптер все же затерялся, но возвращать его полностью автоматически отчего-то не хочется. Тогда переводим S2 в крайнее нижнее положение, жмем левый стик к себе и через какое-то время в точке первого включения появится радостно жужжащий дрон.
И снова пара слов про софт. Мобильное приложение мы уже видели, а что же с десктопным? ПО для Mac ожидаемо повторяет участь мобильного собрата, являя собой дизайнерский кошмар и нагромождение непонятно раскиданных пунктов меню. То есть приложение внешне пытается вписаться в экосистему OS X, но делает это не самым лучшим образом. К тому же, многие пункты англоязычного меню пестрят ошибками. Так как компания DJI родом из Китая, локализация интерфейса скорее всего была поручена плохо знающему язык сотруднику. Да и общая организация пунктов далека от идеала, и в поисках нужной опции часто приходится прощелкать едва ли не все закладки.
К счастью, с этим софтом потребуется общаться не часто, а на возможности полета и управления гаджетом неудачный интерфейс программы никак не влияет.
Печальная ода батарейке
Единственное что разочаровало в Phantom 2 Vision+ — это его батарея. Не смотря на то, что коптер снабжен аккумулятором 5200мАч, на долго этого запаса не хватит. Производителем заявлено полетное время 25 минут, однако наш опыт показывает, что уже через 10-15 мин батарея разряжается до 30% и в приложении появляются предупреждения о низком заряде. Сам дрон при этом мигает индикатором Low voltage.
Естественно, чем сильнее ветер и круче виражи тем быстрее заканчивается заряд. Самый долгий полет в 21мин получился в безветренный день, когда дрон в основном неподвижно висел в воздухе. При активном маневрировании на высоких скоростях коптер продержался лишь 10мин.

Я никогда не позволял устройству разряжаться ниже 25%, так как перспектива стремительного неконтролируемого полета к земле несколько пугала. Можно было бы конечно выжать еще несколько минут при низком заряде, но это слишком дорогая игрушка чтобы так делать.
Если хотите провести в полетах пару часов – придется запастись дополнительными батареями. Каждый аккумулятор стоит порядка 6000р, хотя можно немного сэкономить и приобрести комплект из дрона и дополнительной батарейки.
Куда летают и не летают орлы
Будучи размером больше средней птицы и с полетной высотой в три сотни метров, Phantom 2 Vision+ представляет реальную угрозу для самолетов всех размеров. Понимая это, DJI внесла некоторые ограничения в прошивку коптера.
Если коптер обнаружит что на 8 км приблизился к зарегистрированной зоне полетов, он начнет постепенное снижение. И чем ближе к аэропорту – тем ниже будет лететь дрон, а за пару километров и вовсе откажется взлетать.

Эти ограничения программируемы, но потребуется вывести дрон из фантомного режима. С заводскими же настройками он откажется работать рядом с любым аэровокзалом. Мы в аэропорт Хьюстона для проверок конечно не ездили, но форумы полны дискуссий на эту тему. Так что ограничения действительно работают.
Последний взлет и впечатления
Отчасти, этот обзор готовился так долго потому, что управлять дроном действительно здорово — я как мог оттягивал момент возврата гаджета. Ведь, несмотря на небольшое время жизни от батареи, ощущения от запуска коптера на высоту в полторы сотни метров просто невероятные. Такой полет с потрясающе плавной видеосъемкой дает ощущение собственного реактивного ранца, и я практически не преувеличиваю.
На самом деле, сам по себе полет – это только половина удовольствия. Другая половина в том, чтобы после 15-минутной сессии прийти домой, нетерпеливо извлечь видео с SD карточки и посвятить еще 15 мин вдумчивому созерцанию маленького путешествия.

Практически везде, куда я брал с собой Phantom 2 Vision+, люди обращали не него внимание. При этом никто особо не волновался и не нападал на меня, что радует (как в том случае с американцем на пляже). Каждый, кто подходил поближе, явно был прямо-таки очарован дроном и особенно прямой видеотрансляцией полета. От детей до 12 лет самой популярное реакцией было «Вааааа-у! Можно попробовать?!». Хе, конечно же пульт я никому в руки не давал, но при этом с легкостью отцеплял от него смартфон и позволял любопытствующим посмотреть видео и покрутить камерой.
Несмотря на относительно высокую стоимость, герой сегодняшнего обзора даже близко не подобрался по цене к топовым дронам производства DJI. Компания, к примеру, продает 6- и 8-роторные коптеры с возможностью установки разного подвеса вроде профессиональных стабилизаторов и камер для съемок голливудского качества. И рядом с такими бегемотами маленький Vision+ выглядит сущей игрушкой.

Тем не менее, для новичка Vision+ будет более чем достаточен: он весьма энергичный, достаточно функциональный, и при этом пилотирование можно освоить за пару часов практики. Если бы еще стоил раза в два меньше, то я практически наверняка совершил бы импульсивную покупку, особенно с учетом возможностей. А пока что ценна более 50т.р. наверняка будет держать дрон на расстоянии от многих желающих.
Между тем, мне пора заняться отчетом по расходам за этот месяц. Просто не представляю как я умудрился потратить полсотни рублей на… эм… канцелярию и офисные мелочи.
Плюсы:
Довольно функциональный дрон-квадрокоптер с полной поддержкой GPS;
Подстраховывающий GPS-режим позволяет довольно легко привыкнуть к управлению;
Камера на стабилизаторе снимает очень плавные видео;
Наличие всех опций прямо из коробки позволяет получить потоковую трансляцию видео без покупки дополнительных опций;
Если учесть возможности и функционал, ценник не такой уж и высокий.
Минусы:
Камера не так хороша как хотелось бы – качество картинки определенно хуже чем у GoPro;
Настольное приложение – это просто каша из графики и кошмарного юзабилити;
Пока что не способен летать автономно в связке с приложением DJI groundstation;
Несмотря на хорошее соотношение цена-качество, 59990р – это заметно больше, чем многие люди готовы потратить на игрушку;
10-15 минут полета – это чертовски мало и довольно далеко от заявленных производителем значений.
Автор Lee Hutchinson, перевод Вадим Синицкий
Комментарии (2)
| # --- 0 | ||
|

Случайные статьи
Рекомендации и купоны
Новые видео о дронах - ежедневные обновления!




Записи в блогах
RC модельное видео
Новости форума
26 декабря 2024 |
|
Nikita отвечает в теме «APM 2.б» на форуме «Полетные контроллеры» |
Подскажите, пожалуйста, кто может помочь. Хочу подключить регулятор к полетнику, вот такие. Возможно ли это? |
||
24 декабря 2024 |
|
Nikita отвечает в теме «Писк регуляторов» на форуме «Моторы и регуляторы» |
Подскажите, пожалуйста, кто может помочь. Хочу подключить регулятор к полетнику, вот такие. Возможно ли это? |
||
28 октября 2024 |
|
nZr начинает тему «Продам квадрокоптер X210RF 14т.р» на форуме «Куплю - продам» |
Классическая рама 5 дюймов Realacc X210Pro, полётник RaceFlight Revolt F4 V2 32KHz,, камера Foxeer Falkor 3 Mini 1200TVL, видеопередатчик Eachine TS5828-S 40CH 5.8G 600mW. На борту стоит... |
||
31 августа 2024 |
|
pilon707 начинает тему «Квадрокоптер Walkera Rodeo 150 двигатели не работают» на форуме «Покупные квадрокоптеры» |
Во время полета квадрокоптер ударился о дерево и упал... когда я пытался взлететь после этого.... двигатели не вращаются. Что это ESC сгорел? |
||
27 августа 2024 |
|
pilon707 отвечает в теме «Пульт DEVO 7 и приемник к DEVO RX701» на форуме «Другая электроника» |
Посмотри тут https://walkerahelicopter.proboards.com/thread/8/binding-devo-tx-rx |
||
27 августа 2024 |
|
pilon707 отвечает в теме «Квадрокоптер Walkera Rodeo 150 не биндится приемник» на форуме «Покупные квадрокоптеры» |
Нашел тут...все биндится https://walkerahelicopter.proboards.com/thread/8/binding-devo-tx-rx |
||
12 июля 2024 |
|
Ruslan.R начинает тему «Прошу совета по настройке» на форуме «Самодельные проекты» |
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно... |
||
Поиск
YouTube канал сайта

Самые читаемые статьи










