Не так давно китайский стартап Ryze Technology, при поддержке таких именитых компаний как DJI (признанный лидер в производстве квадрокоптеров различного уровня) и Intel, выпустил очень интересный квадрокоптер под названием Tello.
По заявлению производителей, которые хоть и позиционируют его, как квадрик бюджетного уровня доступный всем (а это и правда выглядит так, если взглянуть на цены других квадров от DJI), в нем присутствуют такие серьезные вещи как: 14-ядерный процессор от Intel, система визуального позиционирования, куча сенсоров и гироскопов, а также специально разработанное ПО, оценивающее ситуацию в которой квадрик находится, для обеспечения стабильного и качественного полета.
Те же люди заверяют, что летать на нем может любой: хоть ребенок, хоть взрослый, настолько управление интуитивно понятно. Вот тут как раз такой и попался — я ни разу не профессиональный водитель автобуса летун, более того, всегда причислял себя к тем, кто «рожденный ползать, летать не может», хотя регулярно совершаю попытки сам же это и опровергнуть (в кладовке валяются Parrot Ar.Drone 2 и 3-4 штуки других летательных аппаратов). Кроме этого, фишкой дрона является возможность его программирования с помощью простого объектного языка Scratch (специально сделан акцент на простоту освоения детьми) и наличие SDK. Забегая вперед скажу, что слово «программирование» в текущей реализации — это слишком громко сказано…
Итак начнем, как обычно, с упаковки.
Внутри:
Комплетация:
— квадрик,
— аккумулятор,
— 4 винта (в дополнение к установленным),
— съемник для винтов,
— бумажка
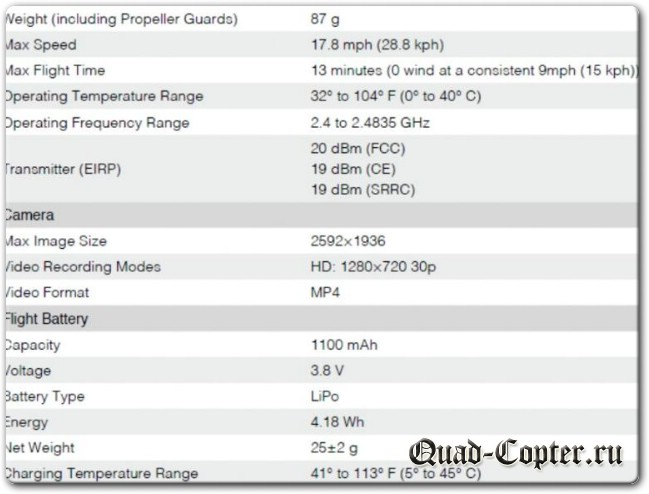
Характеристики квадрокоптера:
Характеристики полета:
Максимальная дистанция полета:100 метров
Максимальная скорость: 8 м/с (28 км/ч)
Макс. продолжительность полета: 13 минут
Макс. высота полета:10 метров
Вес (без аккума):
Инструкция на Tello в pdf с офф.сайта.
Первое что меня удивило, это его размер — он маленький!
Рассмотрим со всех сторон:
Рама квадрика с кучей ребер жесткости, выполнена из прочного легкого пластика и, как оказалось, она просто неубиваемая.
Винты на Tello не одинаковые и взаимозаменяемы только попарно, по диагонали. На одной паре есть риски на пропеллерах, на другой — нет:
Защита на винтах съемная, выполнена из упругого пластика, но лучше ее не снимать, т, к. движки на этой крохе весьма мощные, я как-то, случайно, коснулся их пальцем во время работы — было больно (на других мелких квадиках, таких острых ощущений никогда при касании не было).
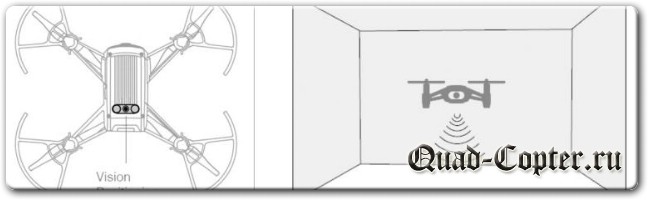
С нижней стороны видны щели обдува (т.к. мощному процессору требуется хорошее охлаждение), датчики и камера системы позиционирования…
… которая называется Vision Positioning System. При работе сквозь линзы заметно красноватое свечение:
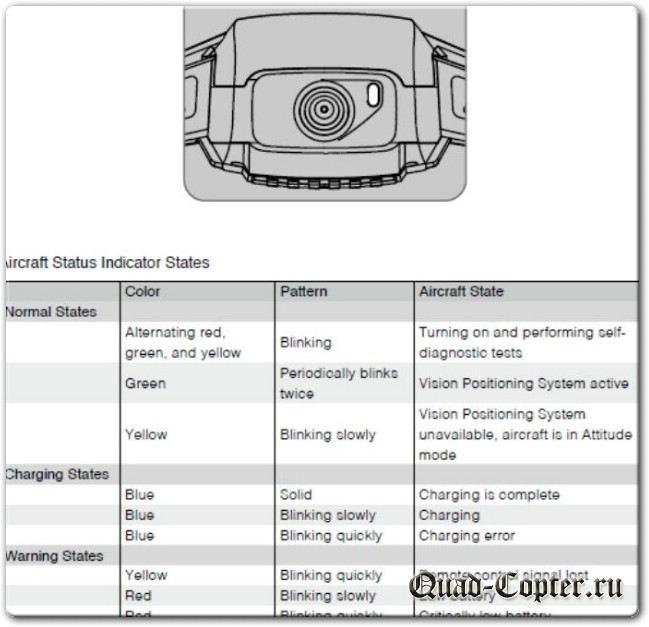
На «мордочке» камера HD720P30 и многоцветный светодиод состояния, который светит различными цветами и мигает с разной интенсивностью, в зависимости от состояния квадрика:
Индикация светодиода в зависимости от ситуации:
Снизу резиновые посадочные ножки, в задние встроены антенны:
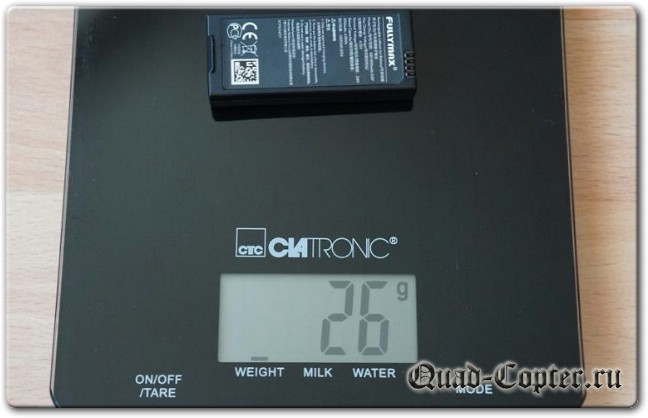
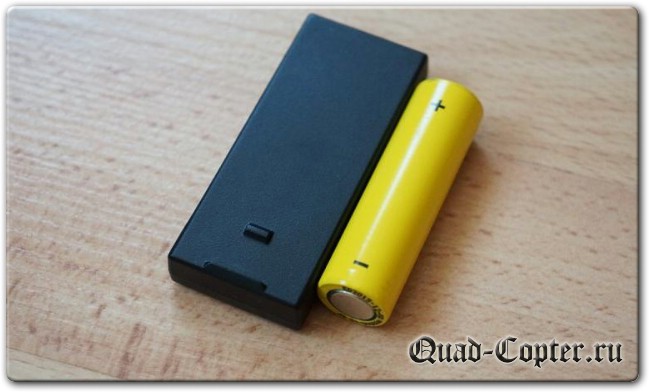
Аккумулятор LI-Po 1100mAh, напряжение 3.8V:
Почти полностью занимает внутренности квадрика :)
Заряжается аккумулятор, установленным в квадрик, через его microUSB разъем, установленный на боковой стороне. Включается аппаратец кнопкой на противоположной от разъема стороне:
Заряжаем аккумулятор и взлетаем…
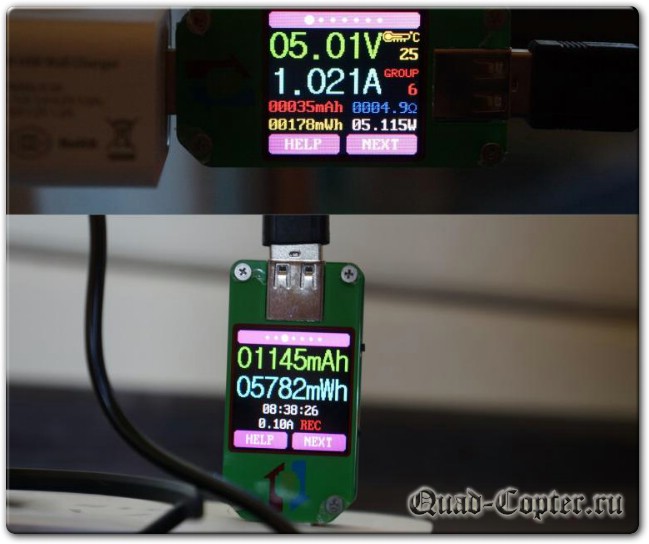
Кстати аккумулятор честный (было бы странно, если бы было по-другому):
Полеты
Управляение квадриком выполняется со смартфона с помощью приложения Tello из Apple store или Play Маркета, еще заявлена поддержка, пока только, контроллера GameSir T1D, но это еще 35-40$.
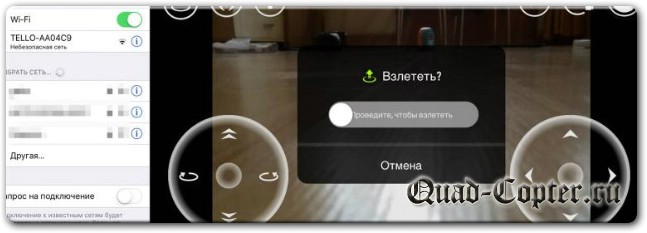
Включаем квадрик, он поднимает свой WiFi к которому коннектим смартфон и в приложении взлетаем не кнопкой, а проведя пальцем слева на право:
Имея опыт управления квадриками со смартфона, особого восторга я не испытывал, однако, тут оказалось все не так плохо, я бы даже сказал очень неплохо. Я не знаю, что сделали разрабы, он елозя по экрану пальцами, удается очень неплохо управлять летуном. Думаю, в этом очень сильно помогает система Vision Positioning System, она позволяет квадрику позиционировать себя в пространстве, ее задача автоматическая стабилизация квадрокоптера в полете, система, по мере своих возможностей, компенсирует все негативные факторы влияющие на стабильное положение квадрокоптера в пространстве, например, сквозняки в помещении или порывы ветра на улице. За счет этого квадрокоптер, при отсутствии управляющих воздействий со смартфона висит, практически, как влитой на одном месте, не смещаясь и не вращаясь вокруг оси (и триммировать его не нужно).
Система, состоит из отдельной камеры и инфракрасного модуля и начинает работать автоматически, сразу после включения квадрика. Работает система в диапазоне высот от 0.3 до 10м (эффективно с 0.3 до 6м)
Естественно, система не всемогущая и при, например, слишком сильном ветре, плохом освещении, движении над бликующей поверхностью (водой) или низко на слишком высокой скорости — может отключиться, переводя квадрик в режим Attitude Mode (режим, когда квадрик ведет себя как простой китайский дрон :), о переходе в этот режим он выдает информацию на дисплей смартфона и меняет цвет светодиода статуса (который около камеры) на желтый-мигающий. Если система отключается на высоте выше 6м, инициируется снижение квадрокоптера. Вообще, отмечу, что ПО выдает весьма разнообразный набор сообщений на дисплей, начиная от информировании о низком заряде батареи до сообщений о слабом освещении (плохо для системы позиционирования) или сильном ветре.
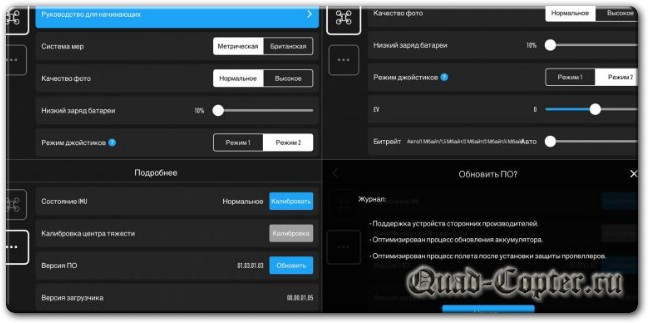
Настроек в приложении не очень много, есть калибровка — но ни разу не потребовалась, даже после жестких падений, квадрик все далает сам. Регулярно выходят обновления ПО:
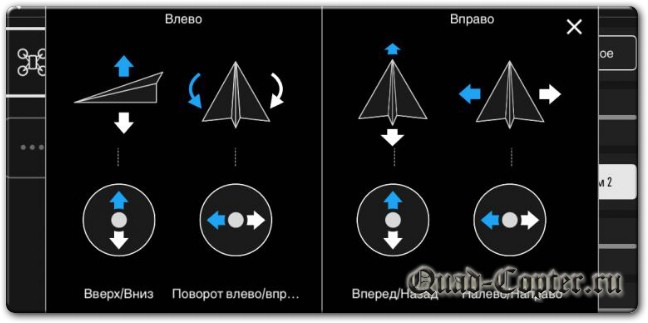
Управление только виртуальными экранными джойстиками, варианта использования акселерометра (управление квадрокоптером наклоном смартфона) нет. Режима Headless (когда квадрик поворачивает вправо или влево одинаково, независимо от того, как повернут к пользователю), также, нет:
После взлета квадрик зависает на высоте около 1.5 метра и там висит пока мы не начнем им управлять:
Были опасения, что это сугубо домашняя игрушка, но, как оказалось, им гораздо приятнее управлять на улице. Мощности двигателей и возможностей системы контроля, хватает для обеспечения стабильного полета даже при некотором ветре, квадрокоптер, до определенной степени, очень быстро сам компенсирует его давление увеличением тяги на нужном двигателе и своим наклоном. Прикольно наблюдать, как машинка, под весьма ощутимым бризом, висит под наклоном на одном месте:
В случае, если ветер сильный или слабое освещение для корректной работы системы позиционирования, выводится соответствующее сообщение на дисплей смартфона.
Зависший квадрик можно рукой толкнуть или даже «закрутить» (естественно в разумных пределах) и он всеми силами постарается вернуться на тоже место, где висел и развернуться в прежнее положение:
Если к Tello в полете поднести руку снизу, он будет от нее отлетать вверх.
В приложении можно выбрать два режима управления «Slow» и «Fast». Они отличаются, примерно, как обычный и спортивный режимы в автомобиле. В режиме «Slow» квадрик движется плавно, дает меньшие крены, скорость поворта вокруг оси меньше, а радиус разворота больше :), на перемещение виртуальных движков реагирует с некоторой задержкой и «ленцой», то есть это режим для спокойного полета или для обучения. НО все меняется при переключении в режим «Fast», ободки джойстиков на экране смартфона становятся синими, а квадрик «просыпается»…
… реакция на управляющие команды, практически, мгновенная, скорость и доступные крены увеличиваются и начинаешь получать огромное удовольствие от управления. Кроме того, в этом режиме, изменяется реакция дрона: если отпускаешь оба виртуальных джойстика, машинка, как будто, «бьет по тормозам», стараясь моментально остановиться и неподвижно зависнуть. Практически, отсутствует инерция, как в обычных квадриках, когда ты отпускаешь джойстик, а дрон еще метр-два по инерции движется в туже сторону, тут квадрик «притормаживает двигателями». Естественно, в скоростном режиме гораздо лучше летать либо в большом помещении, либо на улице.
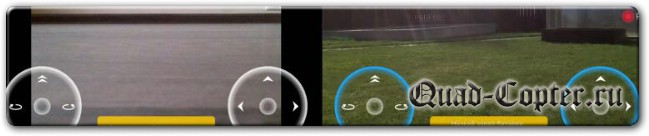
В процессе полета на дисплее отображается заряд батареи, уровень WiFi и даже телеметрия в виде скорости и высоты полета (правда высота отсчитывается от начальной высоты взлета, поэтому может быть и отрицательной :)
Помимо ручного управления в квадрике есть 6 «автоматических» программ:
1. 8D-трюки. В этом режиме на дисплее смартфона выделяется квадратная зона, по которой, смахнув пальцем с одного ее конца на другую, квадрик совершает переворот в заданном направлении: вперед-назад, влево-вправо и по любой из диагоналей туда и обратно. Выглядит очень забавно.
2. Самолетик. Используется при старте квадрика, в этом режиме, держа его на ладони просто подбрасываем его и он не падает, а взлетает. 3. Круг. Это режим для «себяшечек», встал в центр и дрон тебя снимает, кружась вокруг (режима следования за объектом в движении тут нет).
4. Воздушный... («Up&Go»)опять же для селфи, можно направить на себя или на другой объект и он плавно «отплывет» от него назад и вверх. 5. 360°. Режим съемки панорамы в 360 градусов. Дрон зависает на месте и плавно вращаясь делает видео. 6. Мячик. «Подпрыгивает» в полете на месте с высоты от 50 до 120см.
Кроме этого, есть режим эффектной посадки на руку, задав его и поднеся руку примерно на 80-50см снизу, квадрик плавно на нее спланирует:
Впечатления от полета
Полеты даже мне, здоровому мужику, именно на данном дроне, доставили большое удовольствие. В общей сложности налетал около 3 часов. Управление со смарта вполне удобное. По-началу, естественно, в помещении, привыкал к рулежке и не слабо побился об стены, но квадрик это прощает, имея действительно прочный корпус и реально сглаживая огрехи управления. В режиме «Fast» очень чувствителен к управляющим командам, можно точно лететь туда куда нужно и под конец уже не боялся летать даже над речкой. При потере ориентации (где перед, где зад), особенно на дальнем расстоянии, можно просто отпустить «виртуальные стики» и квадрик будет висеть на месте не двигаясь с него и поддерживая высоту.
Что касается высоты и дальности полета: программное ограничение высоты 10м, а дальности — 100м. Не каждый смарт по WiFi управлению до этого добивает, но «отпускал» кроху достаточно далеко и высоко, дальше было просто стремно — его уже не видно:
Кроме этого, без проблем можно работать через Сяомишный WiFi свисток-репитер, подключенный к повербанку, усиливая сигнал от квадрика.
Камера и видео
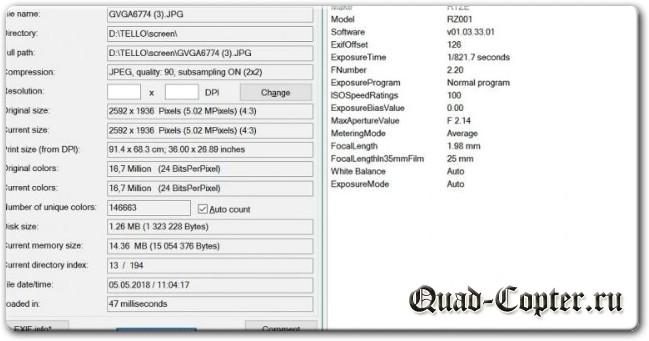
Камера всего 720P, но не самая плохая и, при хорошем освещении, получаются нормальные фотки (2592x1936) и видео (1280x720), можно предполжить, что либо железа на 1080 миниатюрного не нашли, либо в бюджет цены не вписывались с ним.
Со стабилизацией видео все очень средненько. Видео хорошо получается если запускать дрон в автоматическом режиме, типа панорамы или облета по кругу, когда он движется плавно, или, если постараться, плавно летать в режиме «slow», а вот в фаст-режиме, все сильно дергается. В Tello нет никаких носителей информации, куда бы можно было писать видео и фото, все идет по WiFi сразу в смартфон. Кроме этого, судя по всему, в зависимости от качества приема автоматически меняется битрейт, поэтому на высокой скорости, качество видео хуже, да и встроенное ПО, похоже, тоже пытаясь улучшить видео, делает его еще хуже :)
Дальность уверенной передачи картинки не превышает 10м, даже летая по квартире и залетая в соседнюю комнату, картинки уже нет, однако, канал управления работает гораздо дальше. В общем, видео можно писать с дрона на весьма ограниченной дистанции. Микрофона в квадрике (как и во всех DJI дронах) нет.
ФОТО С КАМЕРЫ
ВИДЕО С КАМЕРЫ
Быстрый полет:
Автоматический режим съемки 360°:
Автоматический режим «Воздушный» (вверх и назад):
Пролет над рекой:
Батарея
Просто порадовала. Первый раз вижу квадрик такого размера и такой отдачей от аккума, с временем непрерывного полета около 15минут (это реальное время полета). Аккум литий-полимерный, заряжается током от 1 до 2А, примерно, за 40минут. Но и цена батарейки не слабая: один аккум стоит около 25$.
Программирование
Ну это громко сказано. Хотя на оффсайте информации по этой теме практически нет, мне даже удалось разобраться что да как, по роликам и инфе с Ютуба. Все не так уж и тривиально. Официально поддерживается простенький объектный язык Scratch, ориентированный на подрастающее поколение для написания простых игр и анимации. К нему можно прикрутить уже готовый модуль SDK от Tello, который позволяет запрограммировать кнопки клавиатуры на перемещение квадрика на заданное расстояние, установку скорости, угла поворота, взлет, посадку, флипы и… в общем-то, все. То есть просто управляем Tello с компьютера, причем в куцем режиме, нажал кнопку вперед — он передвинулся на 10 см (ну или на 20 — это можно запрограммировать), нажал другую — повернулся, третью — совершил посадку. Я думал, поначалу, что можно, как-то, запрограммировать автоматический полет, оказалось, что фигушки — этого сделать нельзя.
По инструкции, как требовалось, поставил:
— Scratсh,
— Node.js,
— AdobeAIR
— скачал файлы SDK
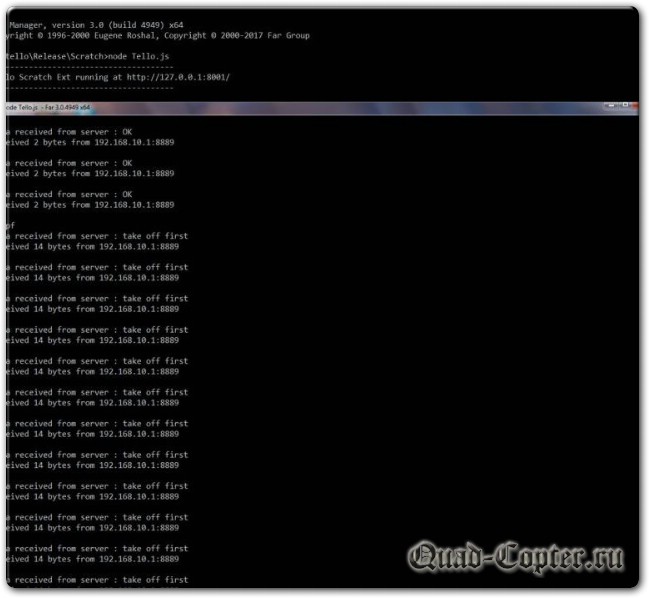
И, как это ни странно, оно даже заработало:
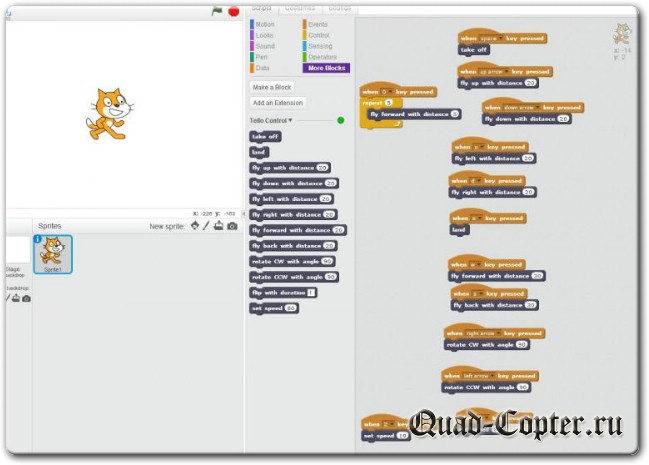
Квадрик приконнектился по WiFi к компу и в Scratch-е появилась возможность написания скрипта для Tello. Выглядит это так:
Запускаем скрипт и жмем заданные в нем кнопки на то или иное действие, квадрик выполняет команды — вот и вся потеха. Не интересно и скучно, хотя детям наверное самое оно.
Есть еще программа для IOS и Android под названием DroneBlocks, там функциональных блоков сильно больше, чем в Scratch, под спойлером видео (не мое) программирования и полета:
Программирование Tello программой DroneBlocks
Умельцы на форумах потихоньку начинают «расковыривать» модельку, увеличивая дальность полета и приема фото-видео, что не может не радовать.
Разборки до корки не делал :), но снял нижнюю крышку:
Верхняя «шкурка» тоже снимается (продаются отдельно разных цветов):
За время полетов из потерь: 2 винта, первый сломал по глупости, второй слетел с движка, когда дрон запутался в высокой траве. Комплект винтов тут же заказал, цена около 1.5$ за 4 штуки. Движки стоят, вроде как, вот такие: DJI Tello Motors 8520 Coreless CW CCW, если что, тоже можно свободно купить ~8$ за пару.
Итог
Аппарат суперский. И хоть это первый продукт от RyzeTech, вышел он совсем не комом (хотя, учитывая, кто «родители», было бы странно ожидать другого). Да это игрушка, но, имхо, с задатками старших братьев. Не без недостатков, типа отсутствия стабилизации видео и пульта в комплекте, но уж точно, на голову выше других бюджетных квадриков в той же ценовой категории. Небольшой, прочный, очень качественно изготовленный и отлично управляемый квадрокоптер.
В общем, крайне рекомендую.
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...