Если вы решили собрать квадрокоптер своими руками, то вам необходимо знать из чего сегодня состоят эти мультироторные летающие машины.
И так, в первую очередь необходимо выбрать чертежи квадрокоптера подходящей модели – определиться с размером рамы, количеством моторов и их расположением, а также типом микропроцессорной системы контроллера полета квадрокоптера, которая будет определять набор датчиков, стабилизацию, отвечать за полет, а также обеспечивать дополнительные возможности аппарата. Выполнение всех этих задач зависит именно от правильного выбора платы.
Основательное продумывание деталей при выборе нужных технических характеристик квадрокоптера позволит в дальнейшем использовать его с максимальной эффективностью. Например, если аппарат приобретается для ведения аэрофотосъемки, то необходимо подобрать модель, способную удерживать в полете дополнительный вес аэрофотосъемочного комплекса.
К основным составляющим квадрокоптера относятся следующие детали.
• Рама

Рама является важной составной частью этого летательного аппарата, поскольку обеспечивает надлежащий внешний вид, правильное распределение узлов и нагрузок, а также простоту проведения ремонтных работ.
Раму можно изготовить в домашних условиях при помощи подручных средств, или же приобрести в готовом виде и только собрать. На сегодняшний день в свободной продаже имеются самые разные виды рам. В целом она выглядит как перпендикулярно пересекающиеся рейки с пластиковой крестовиной посредине для крепления платы. На сегодня самый распространенный вариант рамы предполагает использование алюминиевых профилей и крестовины из текстолита. Если есть желание потратить по больше денег, то используются карбоновые трубы вместо алюминия. У некоторых видов квадрокоптеров рамы имеют усиленную портативность – они могут складываться и удобно переноситься.
• Плата-контроллер

Как уже говорилось раньше, эта вещь является предопределяющим условием работы аппарата, отвечает за его функциональность и в целом летные возможности. Невзирая на свою компактность (около 5 см х 5 см), у нее есть все необходимое для работы самодельного квадрокоптера.
При креплении платы-контроллера следует помнить, что она должна размещаться на одной линии с линией вращения винтов. Кроме того очень важно уберечь плату от вибрации при соприкосновении с рамой. Чем выше виброизоляция, тем стабильнее летает квадрокоптер, особенно в автоматических режимах. Не стоит забывать также и о защитной крышке, которая убережет плату от повреждений и пыли. Последней очень много при взлете и посадке.
• Моторы

Жестких требований при выборе моторов не существует – можно выбрать любой вариант с вращением 800-1200 об/вольт для 3S аккумулятора. Мощность электродвигателя зависит от предполагаемых размеров и назначения квадрокоптера.
Если вы собираете квадрокоптер для Drone Racing, то на него ставятся небольшие моторы с оборотами в 2200-2300, смотрите статью 10 моторов для Drone Racing для более подробного ознакомления с этими электродвигателями.
• Электронный регулятор оборотов двигателя

При выборе этой детали следует неукоснительно соблюдать некоторые правила:
- Выбирать самое маленькое время отклика (от него зависит точность управления при полете).
- Провести калибровку регуляторов до первого полета. Избегать наличия функции защиты от помех в условиях быстрых осцилляций газа от платы-контроллера (использование такого регулятора может привлечь к отключению аппарата в полете).
- Обратить внимание на возможность перепрошивки регулятора специальной коптеровской прошивкой или взять Afro регулятор (они уже прошитые).
• Пропеллеры

Для создания простейшего квадрокоптера понадобится два пропеллера, вращающихся влево, и два пропеллера вращающихся вправо. Таким образом, легко можно представить принцип их работы и возможность держать в воздухе устройство.
Пропеллеры должны быть узкими, с малым шагом винта. На практике устанавливают попарно пропеллеры разных цветов – таким образом можно будет идентифицировать переднюю и заднюю часть аппарата.
• Соединения
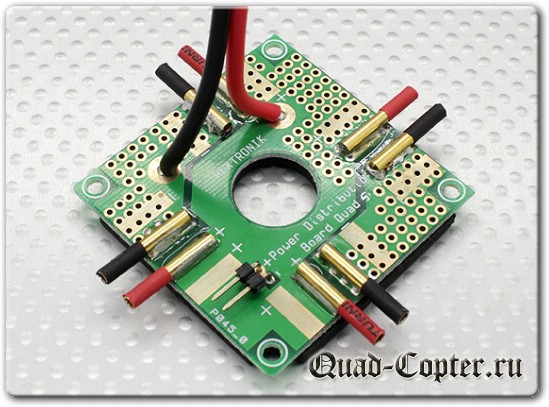
Ввиду наличия нескольких деталей, собранных на одной раме (пропеллеры и плата), становится проблемой правильно разложить и закрепить провода. Хорошим выходом из положения станет специальная плата из текстолита, которая имеет разведенные дрожки питания. Именно к ним можно припаять провода и подвести освещение.
О том, как соединить все это вместе смотрите статью - Соединение электроники квадрокоптера.
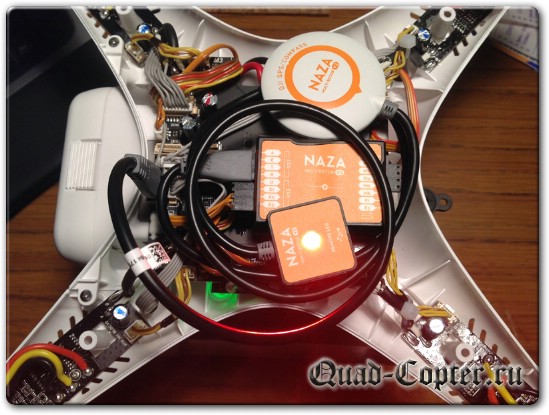
• Маркировка и навигация
.jpg)
Готовый квадрокоптер имеет правильную форму и четкую симметрию, потому нужно его каким-то образом маркировать, обозначив переднюю часть. Как писалось ранее, многие используют разноцветные пропеллеры или разноцветные светодиодные ленты.
Удобным способом маркировки может быть установка специального шара, а также правильное освещение - подсветку квадрокоптера, которая будет отчетливо видна в вечернее и ночное время. При свете дня переднюю часть можно легко различить и при помощи специальной раскраски.
• Разнообразные показатели
Для работы квадрокоптера понадобится довольно много датчиков, например, обязательно наличие трех гироскопов и акселерометров – это тот минимум, который обеспечит полет и отлаженное управление. Вместе с тем, на специализированных форумах можно найти множество советов о дополнительных возможностях и необходимых для этого датчиках. Также выбор будет зависеть и от задач, которые возложены на квадрокоптер.
Так, к примеру, для автоматического возврата при потере связи контроллер квадрокоптера должен иметь GPS антенну и преобразователь сигналов. Для четкого контроля высоты полета - бародатчик.
Стоит также отметить такую полезную деталь, как показатель заряда аккумулятора и датчики, позволяющие определить местонахождение аппарата в случае его потери. В качестве последнего может выступать установленный в квадрокоптер GPS треккер. В случае потери квадрокоптера с помощью него можно точку, где он приземлился при окончании батареи.
• Установка камеры

Принцип крепления камеры должен быть тщательно продуман. На малых моделях квадрокоптеров преимущество отдается обычной жесткой фиксации. Вместе с тем, в более сложных моделях камера крепится на подвесе, который гиростабилизирует съемочную камеру, а так же может управляться с пульта. Стабилизация видео делает съемку более качественной и резкие дерганья квадрокоптера не сказываются на записи видео.
В качестве камер для квадрокоптера отлично зарекомендовали себя экшенкамера SJ4000 и экшенкамера SJ4000.
Похожие статьи:
Аксессуары квадрокоптеров → Регуляторы для самодельного квадрокоптера
Видеоподборки про RC моделизм → Сборка гоночного Дрона на формованной раме и регуляторе 4в1
Видеоподборки про RC моделизм → Хватит жечь дорогую электронику!!!
Квадрокоптер своими руками → Сборка миниквадрокоптера под FPV
Квадрокоптер своими руками → Как соединить электронику квадрокоптера
Видеоподборки про RC моделизм → Делаем коннексолёт с регулятором 4-в-1
Видеоподборки про RC моделизм → Сборка бешеного квадрокоптера!! 3дюйма 5S Lipo! (I)
Аксессуары квадрокоптеров → Недорогой DC-DC конвертер






















