KK 2.1.5 или KK Mini (мозг мультикоптера. Это все сложные расчеты и скорости управления двигателем для стабилизации или направления мультикоптера)
Пропеллеры прямого и обратного вращения.
Моторы (3 штуки)
ESC регуляторы (3 штуки)
LiPo аккумуляторы (1-4 штуки)
Зарядное устройство для LiPo
Поворотный механизм заднего мотора.
Стандартного размера сервопривод (Futaba S3003, можно и другой)
Кроме того, необходимо иметь пульт радиоуправления. Turnigy 9XR является дешевым радиопультом. Вам также понадобится приемник
Шаг 1: Почему Т-Copter? А не Tri-Copter или Quadcopter
Всегда существует компромисс в выборе, который вы делаете. Если у вас есть ограниченный бюджет, Т-Copter / Tri-Copter имеет один двигатель + ESC комбо и, следовательно, дешевле, чем Quadcopter. Кроме того, создание портативного Quadcopter гораздо сложнее, чем Т-Copter / Tri-Copter (Но это невозможно).
Quadcopter с другой стороны, является более стабильным (не то, чтобы Т-Copter плохые в этом смысле) и включают в себя меньше сложных движущихся частей.
Преимущество T-Copter над Tri-Copter просто в ориентации. В какой-то момент полета ваш мультикоптер вы можете потерять из вида, и возможно, это приведет к аварии. Так как Т-Copter не является симметричным по своей оси, то шансы, что это произойдет меньше, чем при управлении Tri-Copter.
Шаг 2: Выбор размера T-Copter
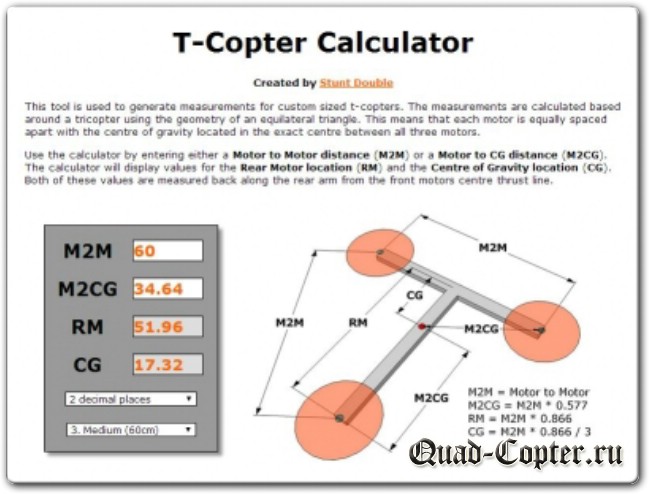
Следующий шаг заключается в определении размера T-Copter. Размер определяется расстоянием между его двигателями в мм. Если вы хотите стабильности и гладкого полета стоит пойти на размер 650 мм и выше. Если вы ищете какой-то авантюрный и энергичный полет выбирайте в этих рамках 450-550 мм.
Если это ваш первый Мультикоптер, лучше придерживаться больших размеров. Теперь откройте http://tcoptercalculator.co.nf. Это аккуратный маленький веб-сайт дает вам все необходимые измерения для вашего T-Copter. Здесь выбрано средние предварительные настройки для данного проекта.
Запишите свои размеры и положение CG.
Шаг 3: Выбор материалов для изготовления рам
С чего же построить рамку?
Три самых известных материала, чтобы построить Мультикоптер пока являются алюминий, дерево и углеродное волокно. Среди этих трех материалов углеродное волокно является наиболее перспективным материалом, но самым дорогим. Он также наименее вибропоглощающий материал и самый легкий из трех.
Алюминий с другой стороны выглядит достаточно хорошо, и дешевле, чем углеродное волокно. Он немного тяжелый, чем углеродное волокно, но имеет хорошую характеристику поглощения вибрации.
Третий материал, идеальный, чтобы построить ваш первый Мультикоптер старое доброе дерево. Самый дешевый, с ним легко работать, имеет неплохие характеристики поглощения вибраций, вот наш выбор!
Шаг 4: Создание рамки
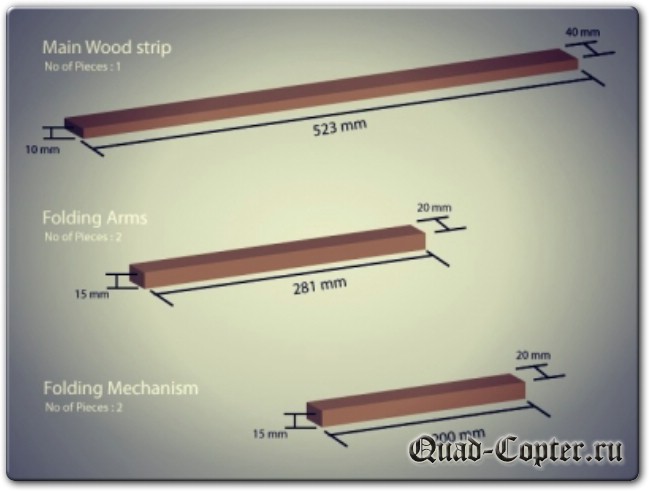
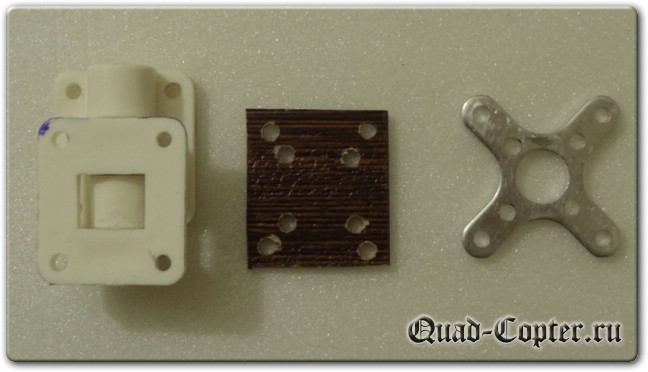
Самый важный аспект, который вы должны соблюдать это расстояние от двигателя к двигателю. Вот размеры кусков древесины, которые были использованы.
Смотрите изображение ниже
Шаг 5: Собираем раму
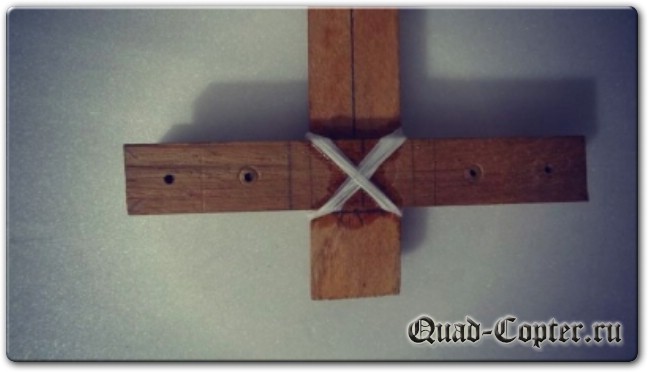
Возьмите основную деревянную полосу и отметьте две точки 519 мм друг от друга и в центральной точке по ширине (20 мм в этом случае). Оставьте 20 мм от обоих краев, как предел погрешности. На одной стороне будет точка хвоста двигателя и механизм складывания на второй.
Хвостовой двигатель будет установлен потом. Отметьте центр линии на деревянной части механизма складывания и используйте эпоксидный клей чтобы склеить части дерева как на фото. После того, как две части, высохли используйте нить, чтобы обернуть вокруг узла и одновременно попросить кого-то наносить клей на нить.
Вставьте откидную ручку в механизм складывания и временно используйте ленту или резиновые ленты, чтобы закрепить ее. Оставьте зазор 10 мм от главной деревянной полосы. Затем просверлите два отверстия (3 мм если использовать 3 мм гайку / болт) через сборку.
Одно отверстие будет иметь гайку, чтобы позволить ручке вращаться вокруг него. Второе отверстие будет использоваться для фиксации открытого положения ручек, используя стяжки.
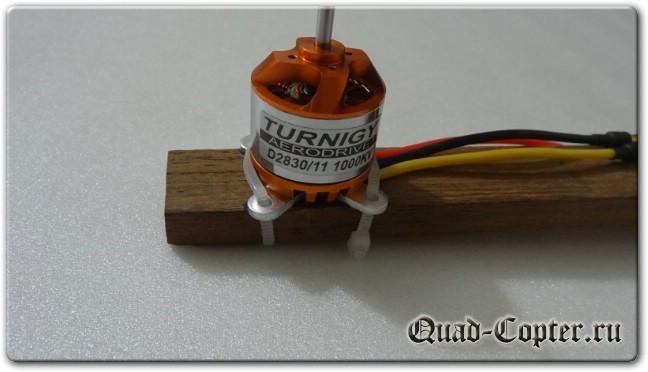
Шаг 6: Установка моторамы двигателя
На складных лучах отметьте две точки 600 мм друг от друга и чтобы они были симметрично относительно главной деревянной полосы. Закрепляются стяжками.
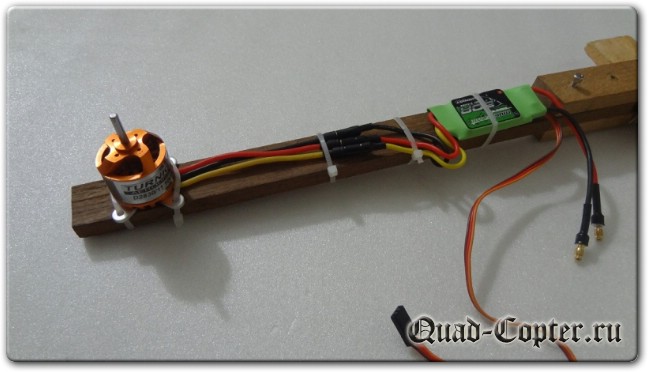
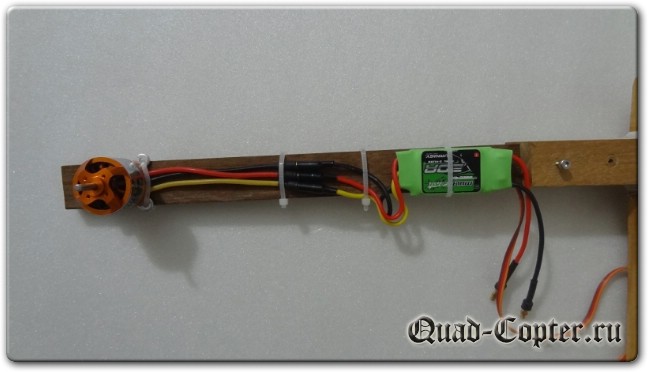
Шаг 7: Установка регуляторов ESC
Мы будем использовать как стандартное вращение против часовой стрелки в нашем T-Copter. Это помогает противостоять крутящему моменту.
Если вы смотрите на T-Copter сверху, винты хвоста и левой ручки должна вращаться по часовой стрелке. Двигатель на правой ручке должен вращаться против часовой стрелки.
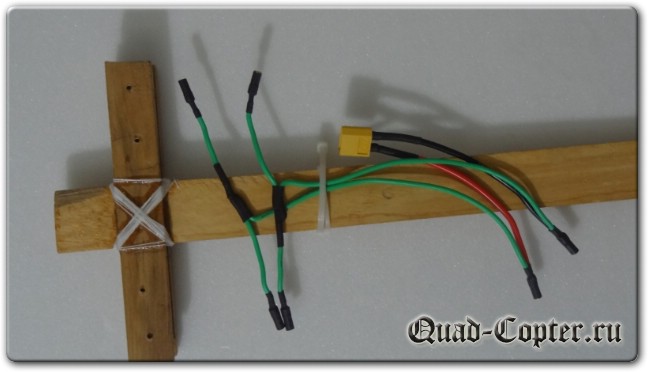
Шаг 8: Питание двигателей
Поскольку одна батарея литий-полимерная будет питать все три двигатели, нужно изготовить жгут проводов, как показано на рис. Это потребует некоторых навыков пайки.
Шаг 9: Хвостовой механизм поворота вокруг вертикальной оси
Т-Copter как и Tri-Copter поворачивает вокруг вертикальной оси наклоняя хвостовой двигатель и, следовательно, направляя тягу в сторону. Этого поворота вокруг вертикальной оси можно достичь, используя сборки серводвигателя и крепежа носового колеса рулевого управления от самолета. Нет необходимости для вас использовать один и тот же механизм. Вы можете найти в Google другие методы выполнения механизмов рыскания Tri-Copter`а.
Используйте стяжки, чтобы закрепить механизм.
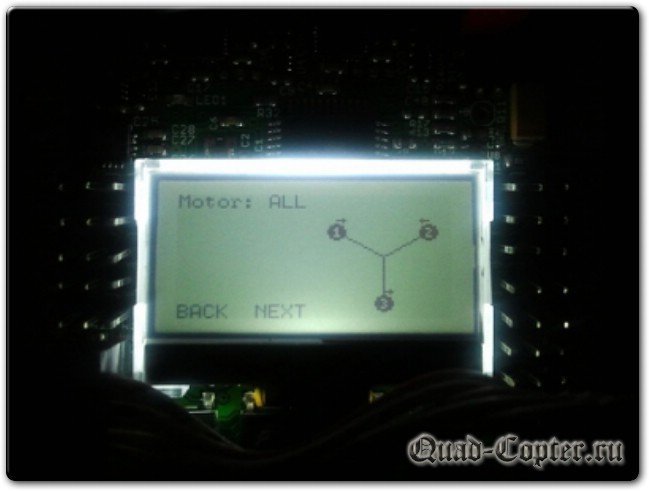
Шаг 10: Монтаж KK платы и приемника
Используется пластиковый судок, чтобы защитить плату контроллера полета и приемник. Поместите коробку как можно ближе к Т узлу, насколько это возможно. Мы сбалансируем Т-Copter противовесом батареи Lipo.
Обязательно прочитайте инструкцию по установке КК2 и как правильно подключить плату с Rx и регулятор.
Шаг 11: Добавление шасси
Лучшее шасси для мультикоптера это отрезок ПВХ трубы (4 дюйма диаметром и толщиной 20 мм). Стяжки для крепления.
Шаг 12: Размещение батареи LiPo
Используйте минимум 2200 мАч LIPO. Поместите ее на верхней части о хвоста с новой полосы и попытайтесь сбалансировать Т-Copter d точке CG, как показано на 2 стадии. Используйте липучки для фиксации батареи.
Шаг 13: Складывайте ваш T-Copter и идите на летное поле
Шаг 14: Полет и краш-тест
Время полета 7-8 минут
Во втором видео этот Т-Copter летел более чем 60 км / час на холме скалы. Но стяжка сломалась и трикоптер терпел крушение. Ничего кроме стяжки не пострадало.
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...