Вот и я решил приобщиться к этому движению. А как иначе, стоит посмотреть пару видео роликов с полетами этих чудо машин, и все, желание сделать так же накрывает с головой. В общем так или иначе мой выбор пал на данную модель.
Подсев на тематические форумы стал изучать что к чему. Уже попробовал свои силы собрав свой первый гоночный квадрик из комплекта для сборки (ZMR250). Но захотелось еще, мощнее, шустрее..
Итак, что меня в нем привлекло:
— конструкция рамы;
— моторы 2204-2300KV;
— и приличная комплектация.
За довольно скромную цену, а это, не считая обязательных вещей, как полетный контроллер и регуляторы моторов, плата распределения питания с двумя стабилизаторами напряжения, светодиодная панель индикации с зуммером, курсовая камера и видео передатчик). Приступаем к распаковке...
Посылка пришла упакованная в пупырчатый пакетик.
Помяли ее изрядно, аж до дыр. Как то мне не везет с упаковщиками, смотрел обзоры других покупателей, им приходила посылка в хорошем виде. Не ужели это наши почтальоны так стараются :(
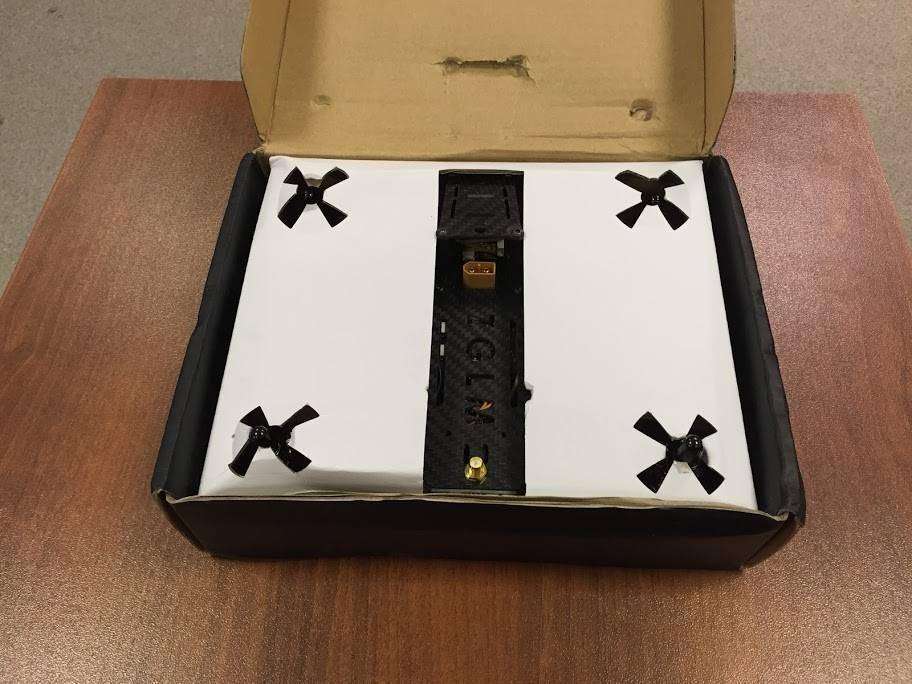
Открываем...
В комплекте:
— Сам квадрокоптер;
— Комплект винтов 5045;
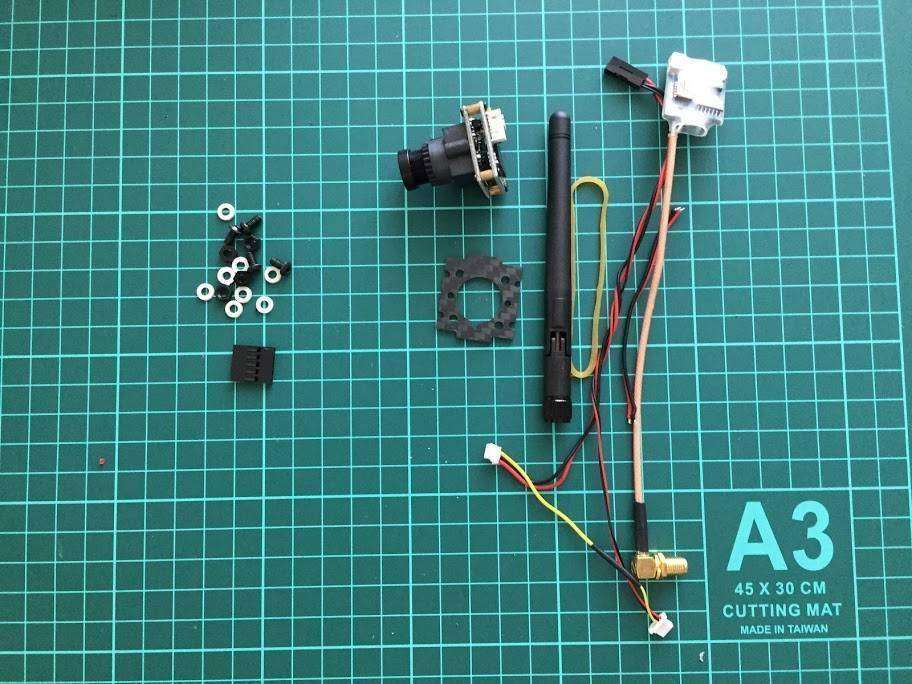
— Антенна на видео передатчик, 5.8ГГц (сосиска);
— Провода для подключения приемника к полетному контроллеру;
— Запасные корпуса на камеру и крепеж;
— Две странички с вариантами поставки и спецификацией.
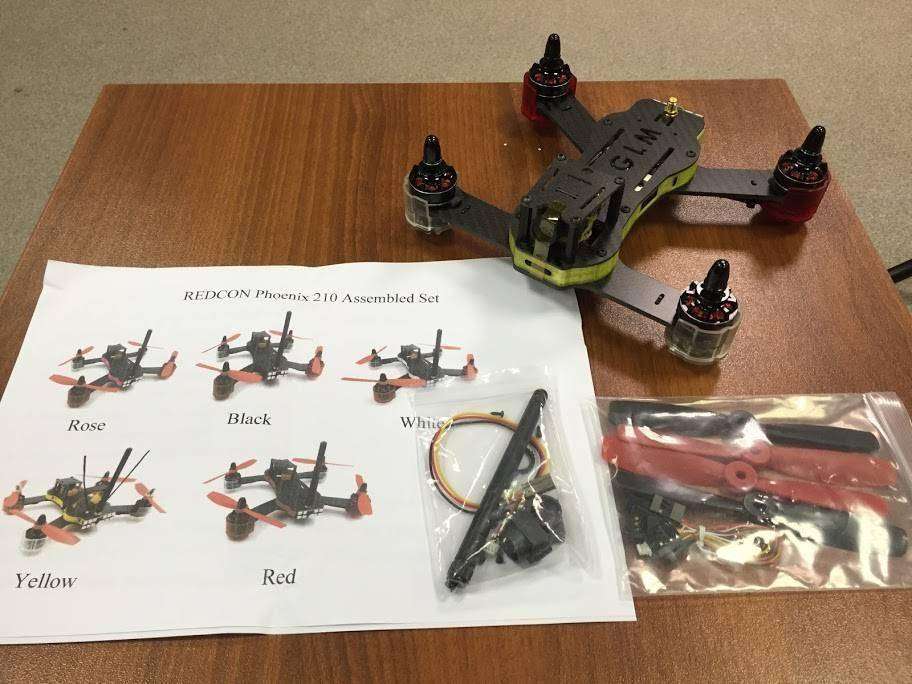
Главный герой крупным планом…
Мотор с интегрированным регулятором и подсветкой.
Моторчики 2204-2300KV
Курсовая камера установлена под углом к горизонту. Закреплена резинкой.
Сервисный USB разъем, выведен в бок и легко доступен.
Сзади установлена панелька с RGB светодиодами и зуммером. А также выведен SMA разъем для подключения антенны.
Вид снизу, провода идущие к регуляторам, уложены в оплетку (змеиная кожа). Также, есть окошко для доступа к переключателям выбора видео канала видео передатчика.
Загадочная аббревиатура или место для аккумулятора.
Мой аккумулятор (3S-1600) не влез, мешает разъем под антенну (буду переносить в другое место).
При включении питания загорается подсветка на лучах.
И в сравнении со всем известной рамкой ZMR250.
Пока из замеченных проблем, это неправильно установлены маунты под винты. В результате там где должна быть правая резьба стоит левая и на оборот. Если оставить так, то винты будут самооткручиваться прямо в полете. Соответственно буду разбирать его, проверять и пересобирать. Проблемы в этом нет, откручиваем и меняем местами.
Подготовка к полетам
Этот квадрокоптер является так называемым ARM комплектом. А это значит, что из коробки он не летает и требуется приложить руки и знания. Тем не менее, это самый распространенный вид поставки в модельном хобби.
Таким образом, что бы полететь на этом квадрокоптере, нам потребуется:
— Авиамодельная радио-аппаратура (на 6 или более каналов);
— Силовой аккумулятор 3S-1500 (но большинство использует аккумуляторы 4S).
— Крепеж для аккумулятора (в комплекте его нет);
— Инструмент (паяльник и принадлежности для пайки, отвертки, нож, термоусадка);
— Инструкция по сборке (читаем соответствующие статьи в сети).
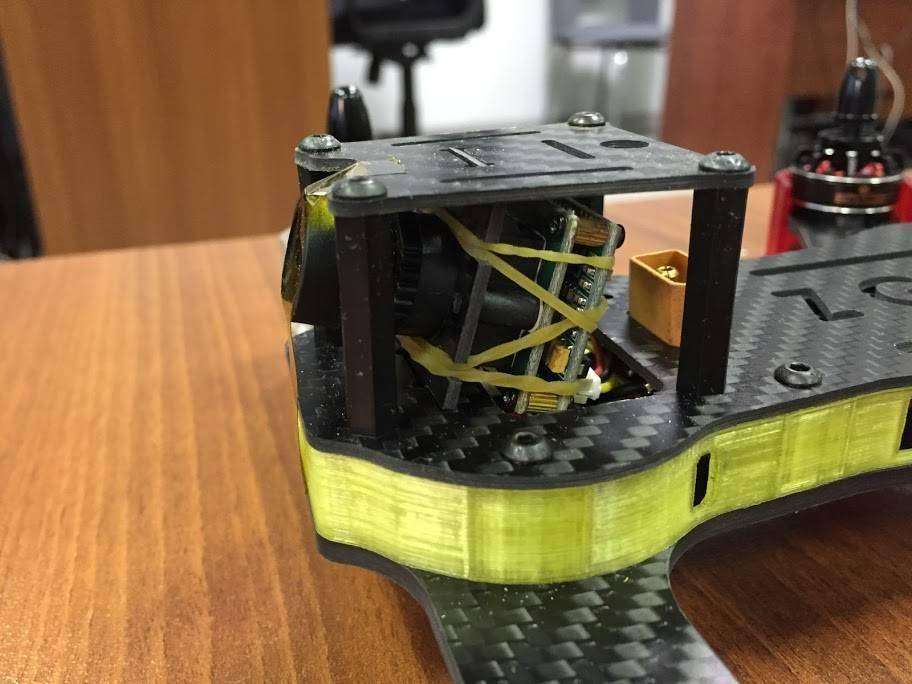
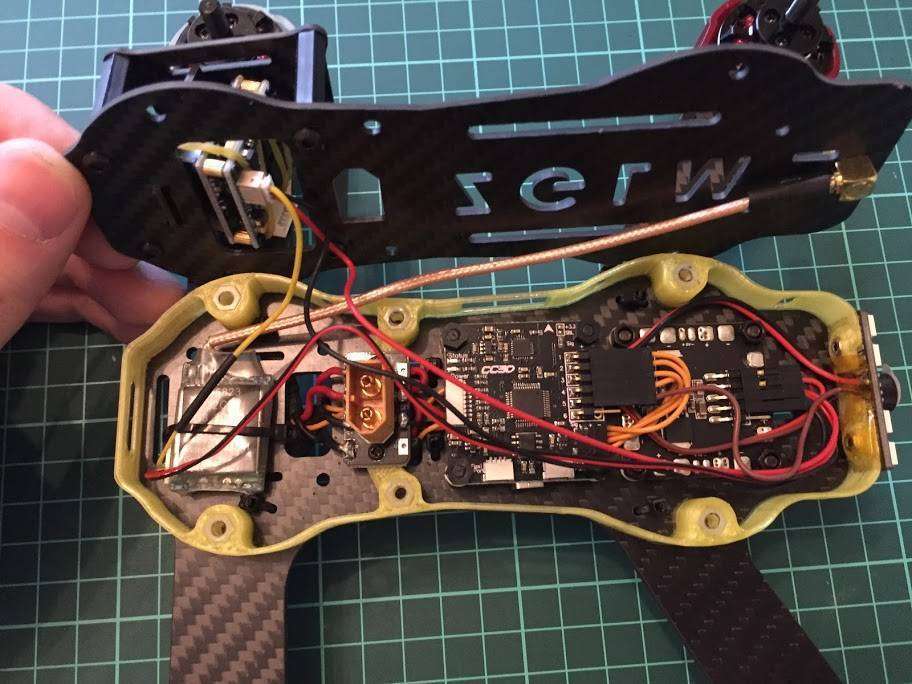
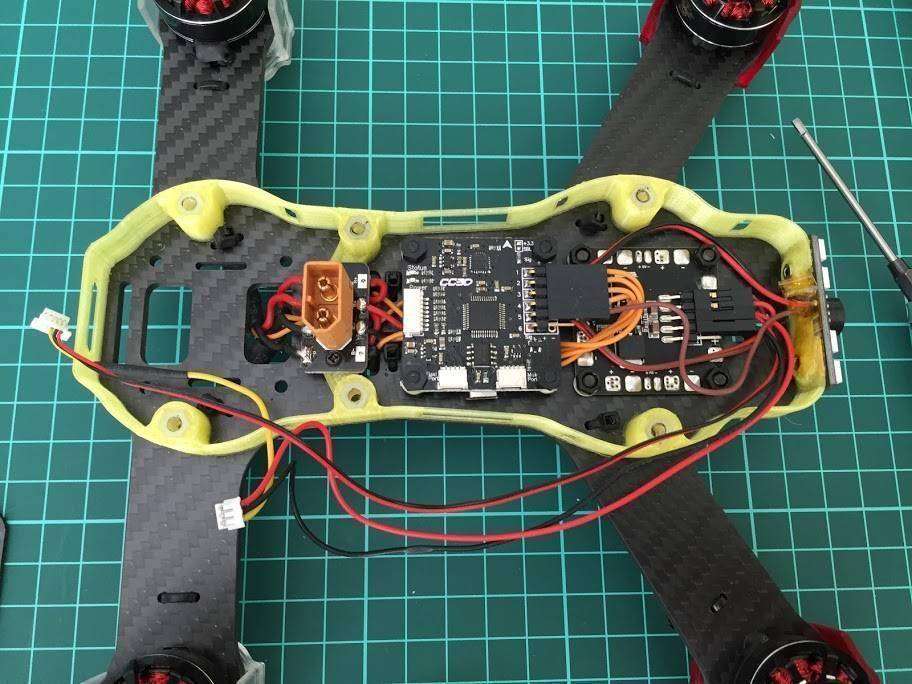
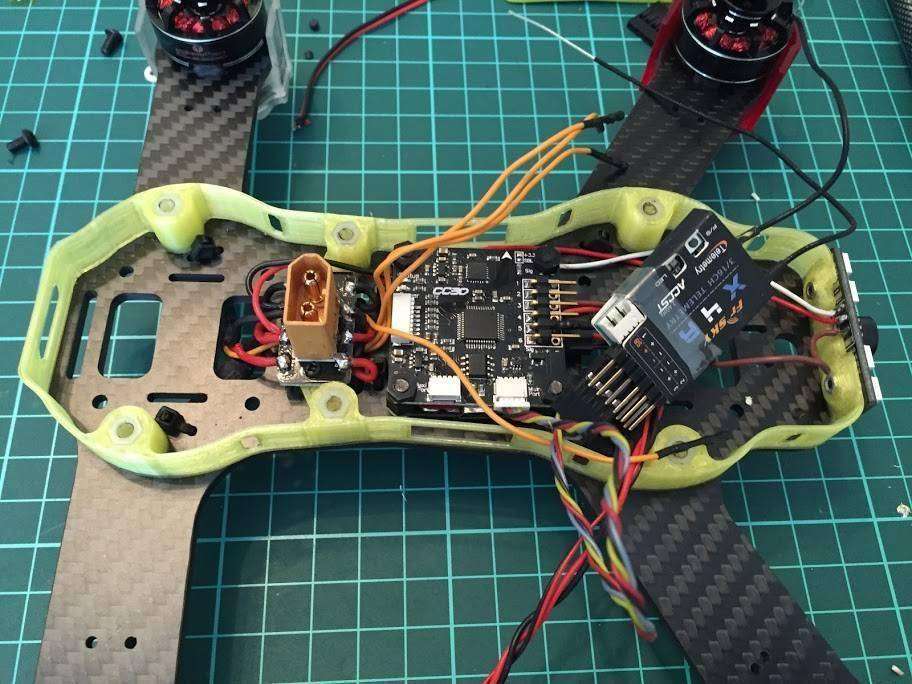
Откручиваем 6 верхних винтов и получаем доступ к внутренностям квадрика…
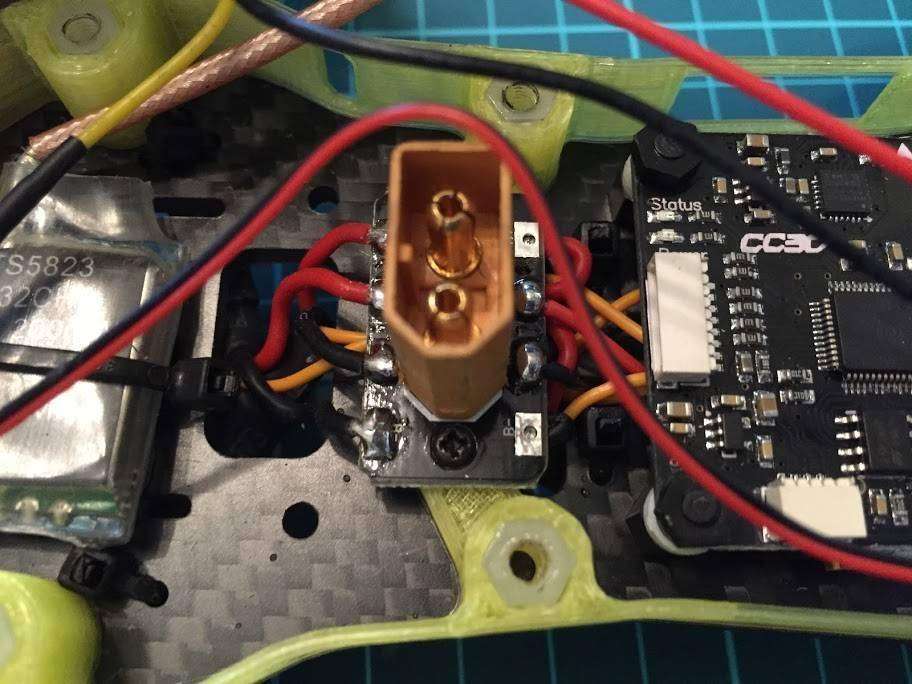
По центру стоит мозг (полетный контроллер) CC3D.
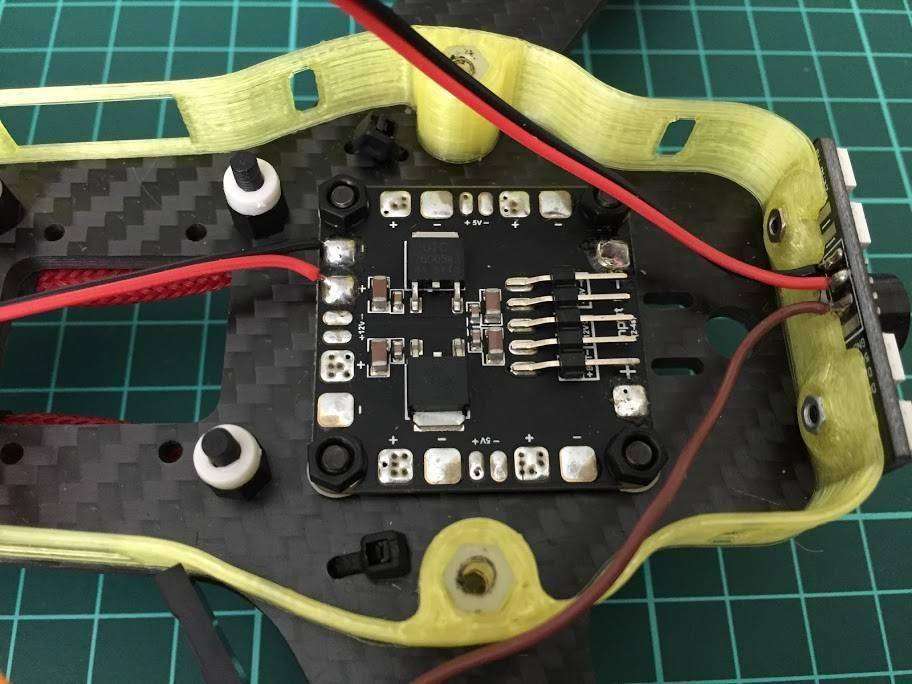
Чуть позади установлена плата распределения питания. Она имеет два понижающих стабилизатора на 12В и 5В.
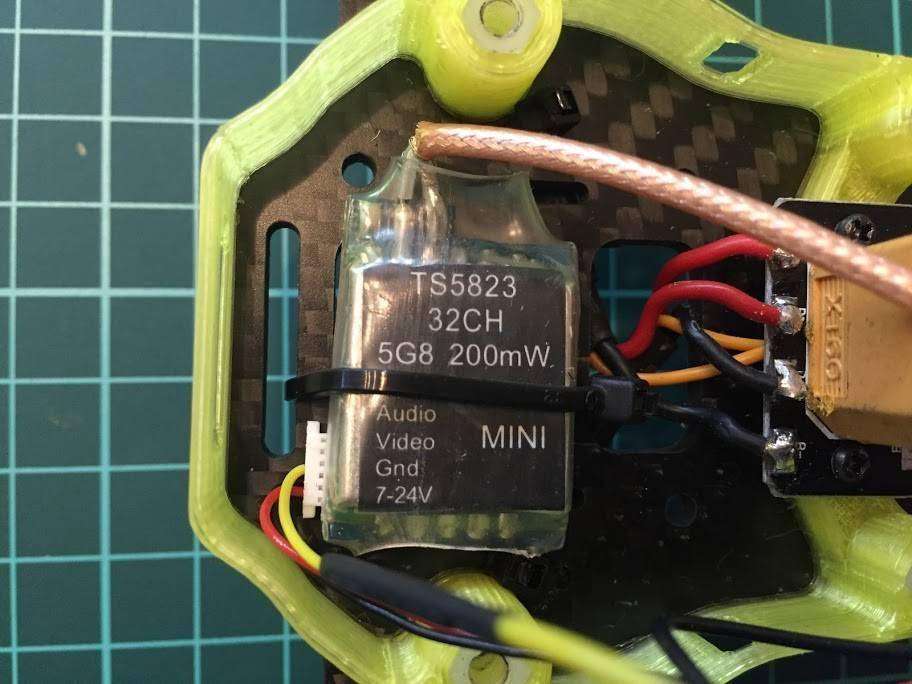
В передней части установлен видео передатчик 5.8ГГц 200мВт.
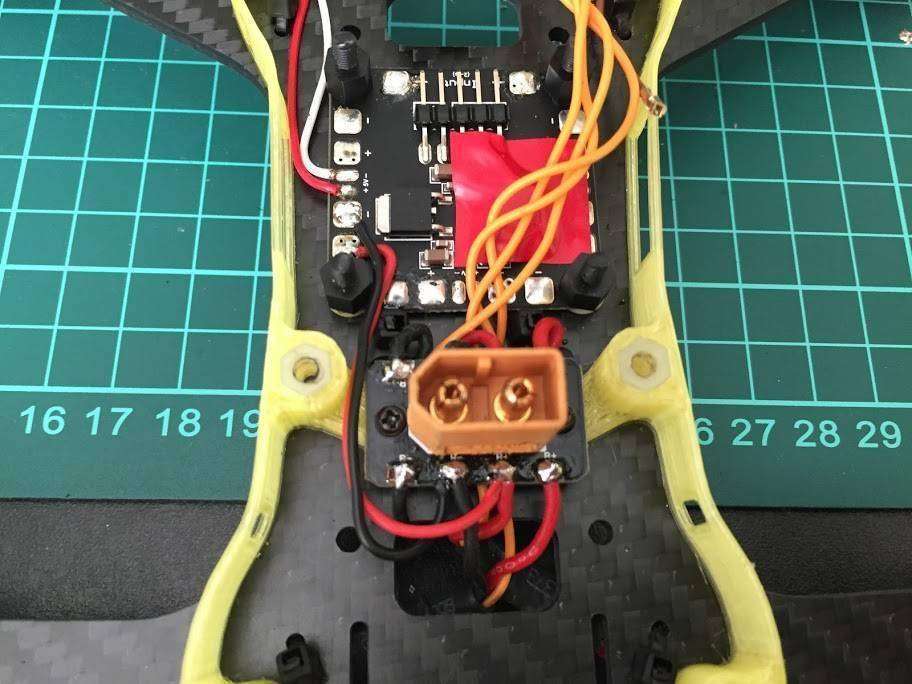
Между видеопередатчиком и полетным контроллером установлен силовой разъем XT60. Он припаян к небольшой плате, которая используется для подключения регуляторов моторов по питанию. К ней же подпаяна и плата распределения питания.
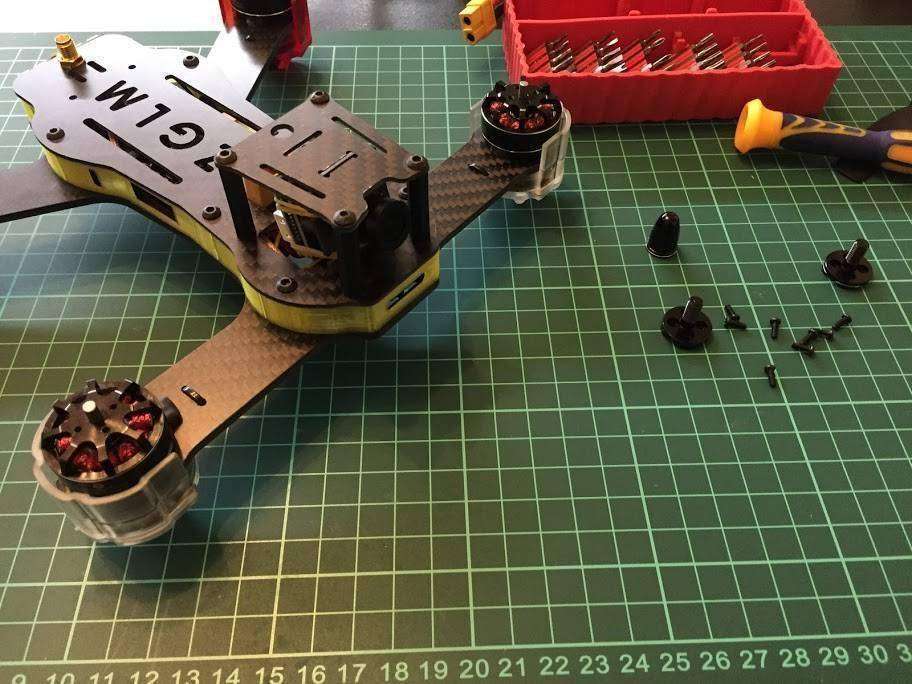
Конструкцию изучили, разбираем. Снял видеопередатчик, крепился стяжкой.
Открутил полетный контроллер, он крепился на капроновых стойках. При этом потребовался паяльник. К нему был припаян провод питания задней светодиодной панели.
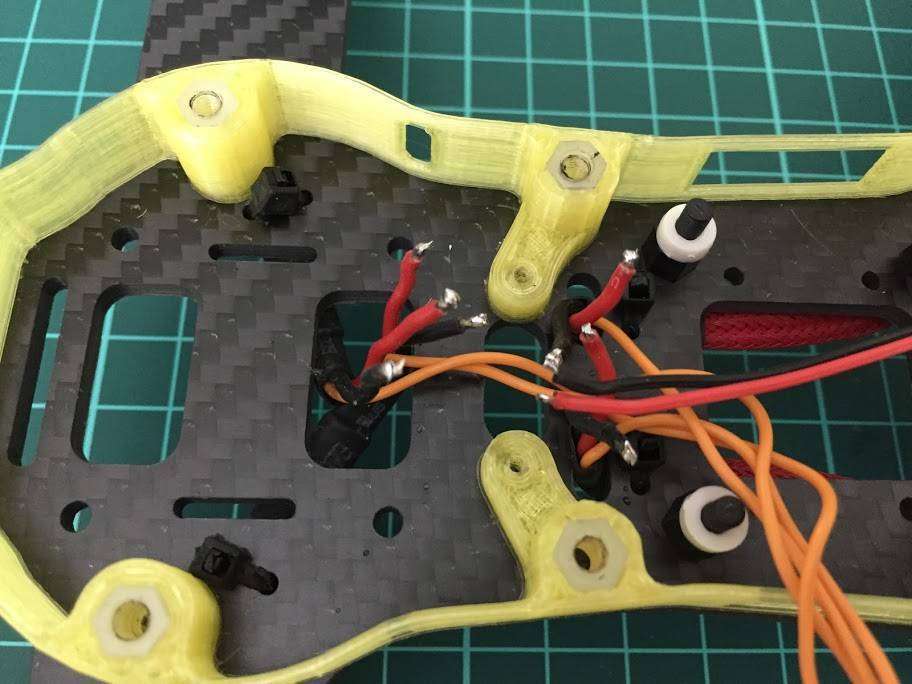
Сначала проверил все моторы, не понравилось то как у них были заправлены провода. По этому раскручивал их все и проверял чтобы провода были заправлены аккуратно (не переламывались и не пережимались), а моторы надежно прикручены.
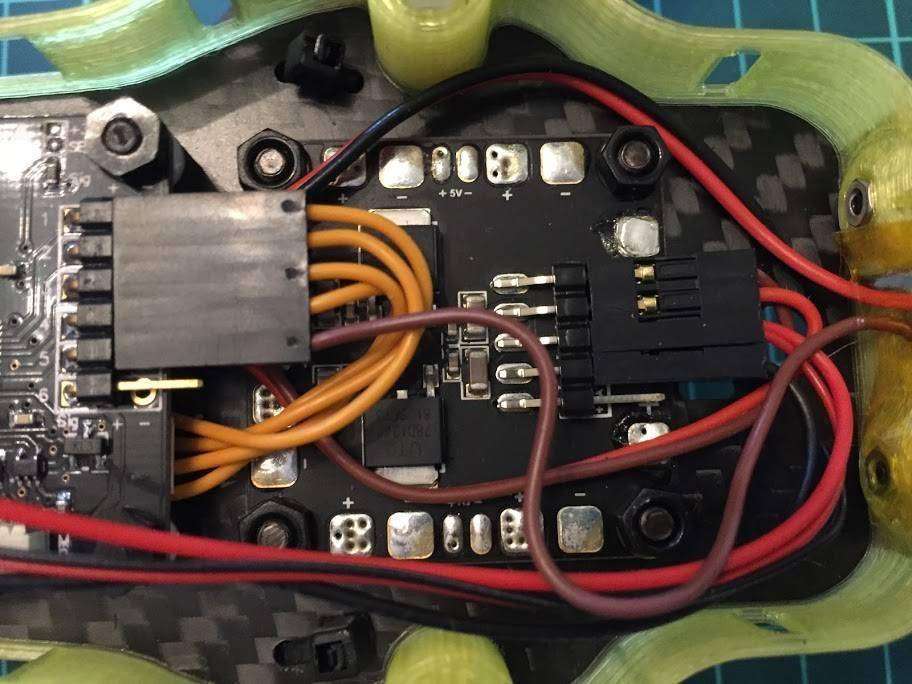
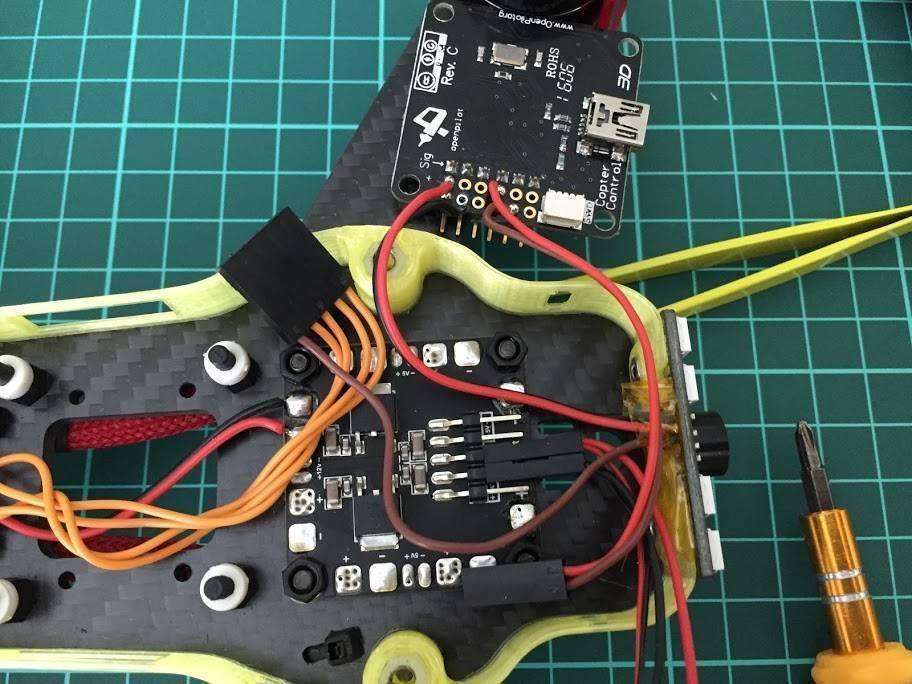
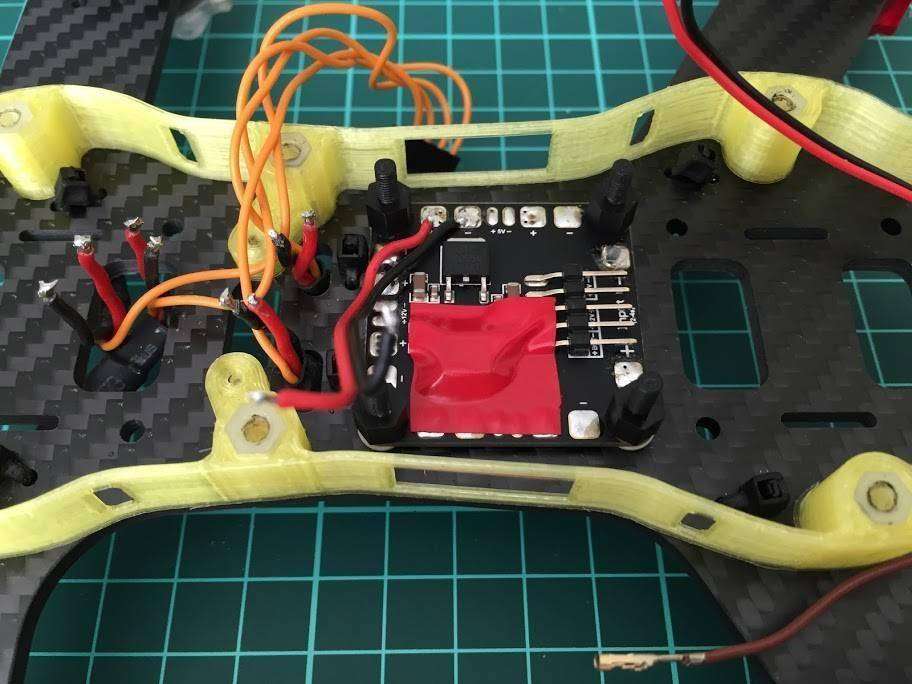
Далее, установил плату распределения питания. Поставил ее по центру на нижний ярус.
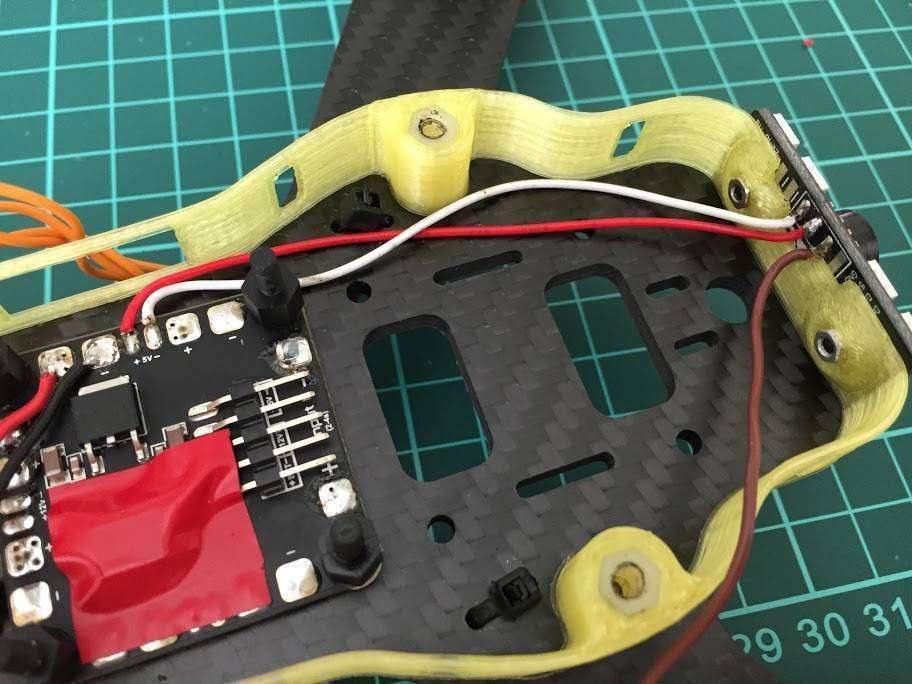
От нее запитал заднюю светодиодную панель (раньше она была припаяна к полетному контроллеру).
Установил на свое место силовой разъем, заново пропаяв силовые провода регуляторов моторов.
Установил полетный контроллер вторым ярусом. Приемник буду подключать по SBUS, подсоединил его в разъем MinePort (UART-1). Сигнальные провода вынул из колодки, а разъемы закрыл термоусадкой. Сделал это для того, чтобы их можно было свободно переставлять, в зависимости от необходимой конфигурации которая задается в прошивке.
Проверил работу камеры и видеопередатчика. Работают отлично, картинка очень хорошая (к сожалению фотография этого не передает).
На этом пока все по переборке. Приемник уложил на место видеопередатчика и закрыл корпус.
FPV оборудование для облета лучше снять. Так как сначала нужно будет его как следует облетать, отстроить параметры полетного контроллера (настройка PID параметров) и только потом можно будет ставить FPV и пробовать летать с видом от первого лица. По этому, после переборки у меня осталось чуть-чуть лишних деталей.
Облет
Для облета, Феникс был прошит прошивкой betaflight, а начальные настройки взяты из видео которое размещено в .
Как видите, Феникс полетел с первого раза (первый неудачный старт спишем на пилота). Настройки, оказались для меня, очень резкими. Нужно будет с ними поработать.
Вообще, настройки такого квадрокоптера (да и многих других), довольно длительный процес. За частую бесконечный, ведь нет предела совершенству. Выходят новые прошивки полетных контроллеров, совершенствуются алгоритмы их работы и тд. и тп. В общем, нужно много летать, пробовать, экспериментировать, учиться самому и учить квадрокоптер летать, все лучше и лучше!
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...