Был изготовлен по спецзаказу, назван мной Хантер, испытан изготовителем (есть видеоиспытания и видеоинструкция), один раз испытывался мной. Назначение было для разведки на охоте и рыбалке. Дополнительно мной изготовлен кофр для его перевозки и пытался изготовить поплавки, но перестал быть охотником и больше ничего не достраивал. Такой большой аппарат использовать только для рыбалки не очень практично. Особенности заказа: хорошая камера (кроме пилотной), возможность установки ПНВ, сирена и система сброса груза по команде с пульта. Недостаток: маленький монитор оператора подарил детям вместе с Фантомом-1.
Все остальные данные и фото в прилагаемом файле. Сам запредельные характеристики не испытывал, т.к. не имею интереса, а использование планировалось чисто в утилитарных целях.
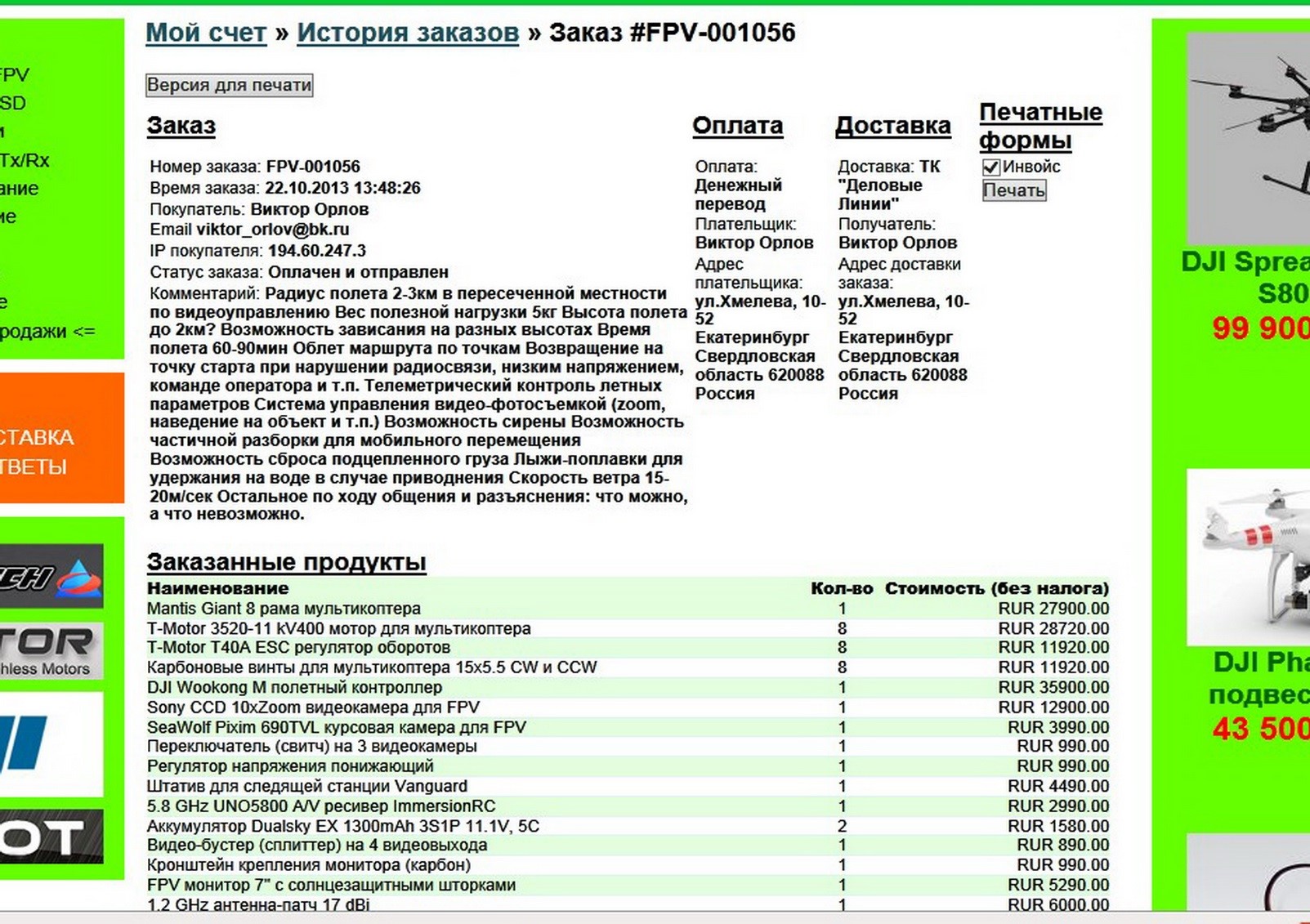
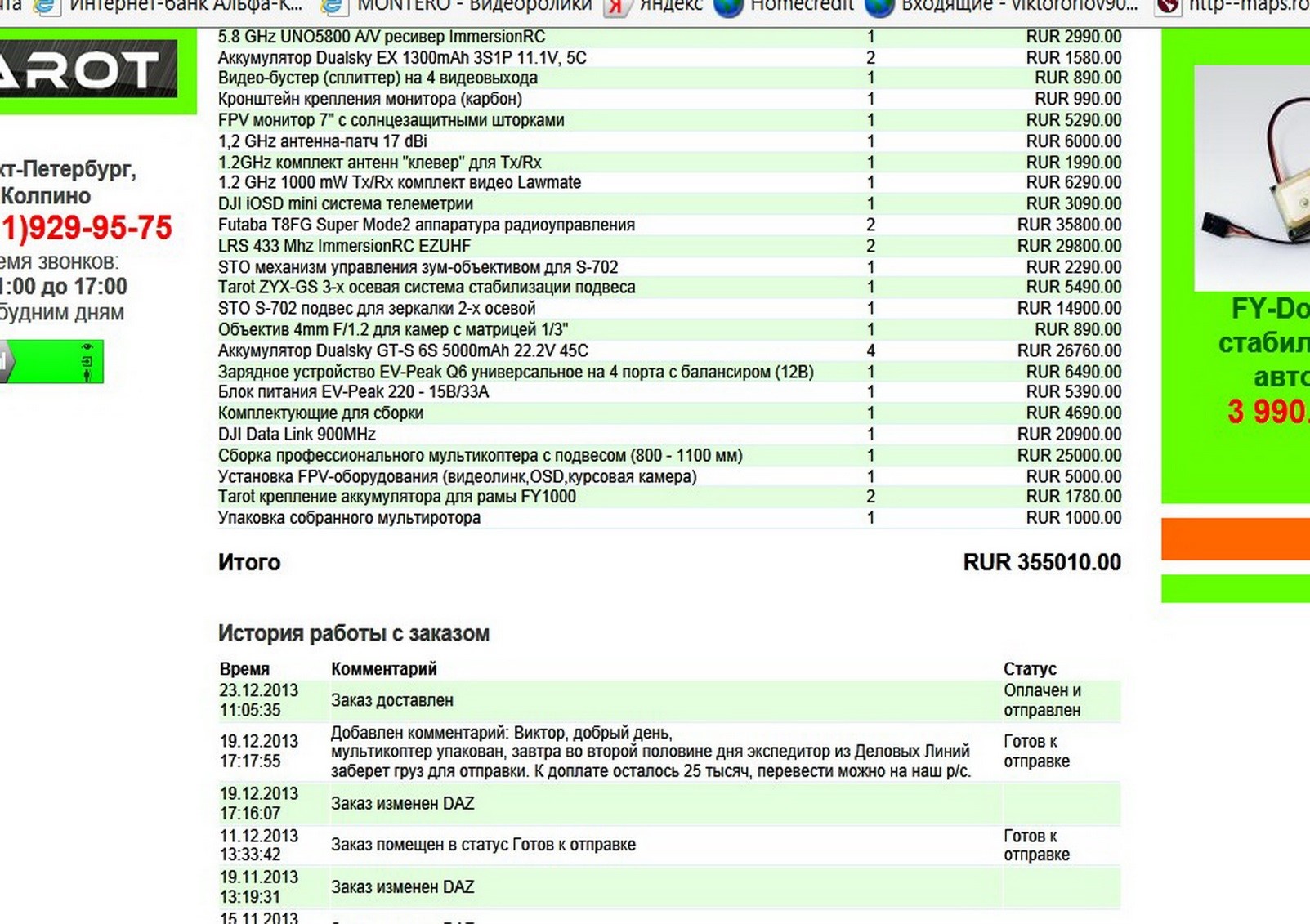
Сейчас жалко, что простаивает, а кто-то мог бы и полетать. Цена чисто с потолка 250000руб. Приобретался за 355000руб.
Сборка профессиональными специалистами Авиамодельного клуба «АС».
Ссылки на испытания и инструкцию:
http://my.mail.ru/bk/viktor_orlov/video/_myvideo/13.html
http://my.mail.ru/bk/viktor_orlov/video/_myvideo/12.html
FH-10Z видеокамера для FPV с 10 x Zoom объективом
Компактная и легкая курсовая FPV камера с зум-объективом, управляемым по
отдельному радиоканалу.
Питание: 10-15В (рекомендуется 3S LiPO)
Размеры: 56.2 (Д) × 38.5 (Ш) × 32 (В) мм
Вес: 75 гр. (без проводов)
На сайте только детализация, чтобы видеть из чего складывается стоимость мультикоптера.
>Предлагаемая мультироторная система имеет следующие характеристики:
>
>Радиус применения до 7,5 км (передача видео на 7,5 км и радиоуправление до 40 км).
>Ветровая нагрузка: до 10 м/сек в автоматическом режиме.
>Точность позиционирования в режиме парения: +/- 0,8 метра по горизонту и +/- 0,5 метра по вертикали
>Температурный диапазон: +50... -10 гр.С
>Полезная нагрузка: до 3-х кг.
>Полетное время (необходимы дополнительные тесты):
>- в легком варианте с зум-камерой предполагаемое время 45 минут
>- с полезной нагрузкой (например тепловизор) предполагаемое время до 30 минут
>
>Функции полетного контроллера:
>- автовозврат при потере сигнала от аппаратуры р/у,
>- автовозврат при снижении заряда батарей ниже установленного порога
>- полет по заранее установленным GPS-координатам
>- управление полетом через специальное программное обеспечение (необходим ноутбук с тачскрином)
>- система передачи телеметрической информации: напряжение аккумуляторов, направление возврата
>домой, высота, горизонтальная и вертикальная скорость, время полета и пройденный путь.
>
>Видеооборудование:
>- курсовая камера для полетов от первого лица и дополнительный объектив для полетов в сумерки
>- видеокамера с 10-ти кратным зум-объективом управляемым по отдельному каналу.
>- предусмотрено подключение 3-го источника видеосигнала (например тепловизора)
>- управление наклоном зум-камеры и тепловизора по отдельному радиоканалу
>- стабилизация изображения с зум-камеры и тепловизора по 2-м осям.
>- управление камерами и переключение между ними осуществляется с аппаратуры р/у
>- на земле видео принимается на монитор повышенной яркости и видеоочки
>
>Сирену пока в расчет не включали.
>
>_______________________________________________________________________
Типовая комплектация:
Рама гексакоптера Tarot Iron Man 1000 .
3-осевой подвес с шасси Tarot TL100AAA для зеркалки
Система стабилизации подвеса Tarot ZYX-GS
Виброразвязка для подвеса Tarot
Полетный контроллер Wookong M
Бесколлекторные моторы Tarot 4114 kV320
Регуляторы T-motor ESC40A
Воздушные винты Tarot T-series 15×5.5″ карбон
Аппаратура радиоуправления Futaba 8J — 2 комплекта
Приемник и передатчик видеосигнала ImmersionRC 5.8GHz 600mW
Монитор 7″ для оператора видеосъемки
Кронштейн крепления монитора к аппаратуре радиоуправления
Ходовые аккумуляторы 2 х 5000mAh 6s LiPO (22.2В) — 1 комплект
Аккумулятор питания монитора 3S 1300-1700mAh LiPO
Аккумулятор питания подвеса 3S 1700-2100mAh LiPO
Зарядное устройство для Lipo аккумуляторов на 4 порта
Комплектующие для сборки (разъемы, кабели, провода и т.п.)
Работы по сборке/настройке и облету мультикоптера
1. На полетном контроллере Wookong высотный горизонт для возврата домой устанавливается через
программу-ассистант. Ее можно скачать с сайта производителя http://www.dji.com/product/wookong-m/download
По умолчанию высота возврата 20 метров. Логика следующая - если высота меньше установленной то, коптер
поднимается на заданную высоту и возвращается, если высота выше установленной, то возвращение производится
в текущем горизонте. Высота исчисляется относительно высоты точки старта над уровнем моря.
2. В среднем режиме логика поведения коптера следующая: он удерживает горизонтальное положение и
высоту, если стик газа находится в среднем положении. Единственное отличие от GPS-режима заключается в том,
что коптер не удерживает текущую позицию и может сносится ветром. Если изменить положение стика газа, то
коптер изменит высоту - поднимется или опустится, а после того как стик вернется на место - стабилизируется на
выбранной высоте. Точка "дом" записывается автоматически, после того как найдены все спутники и включены
моторы.
4. Прописываются 2 порога при просадке аккумулятора. При достижении определенного вольтажа коптер садится
в точку над которой находится в текущий момент. Автовозврат в точку "дом" на Вуконге тоже есть, но пользоваться
им не рекомендуем, это может привести к падению, если не рассчитаете расстояние. После отключения питания
настройки сохраняются.
5. Логика управления Фантомом и большим коптером абсолютна одинакова. Если установить стик газа в среднее
положение - коптер зависнет на текущей высоте и будет удерживать ее, если мы находимся в режиме GPS или
в режиме удержания высоты по барометру.
1. На полетном контроллере Wookong высотный горизонт для возврата домой устанавливается через
программу-ассистант. Ее можно скачать с сайта производителя http://www.dji.com/product/wookong-m/download
По умолчанию высота возврата 20 метров. Логика следующая - если высота меньше установленной то, коптер
поднимается на заданную высоту и возвращается, если высота выше установленной, то возвращение производится
в текущем горизонте. Высота исчисляется относительно высоты точки старта над уровнем моря.
2. В среднем режиме логика поведения коптера следующая: он удерживает горизонтальное положение и
высоту, если стик газа находится в среднем положении. Единственное отличие от GPS-режима заключается в том,
что коптер не удерживает текущую позицию и может сносится ветром. Если изменить положение стика газа, то
коптер изменит высоту - поднимется или опустится, а после того как стик вернется на место - стабилизируется на
выбранной высоте. Точка "дом" записывается автоматически, после того как найдены все спутники и включены
моторы.
4. Прописываются 2 порога при просадке аккумулятора. При достижении определенного вольтажа коптер садится
в точку над которой находится в текущий момент. Автовозврат в точку "дом" на Вуконге тоже есть, но пользоваться
им не рекомендуем, это может привести к падению, если не рассчитаете расстояние. После отключения питания
настройки сохраняются.
5. Логика управления Фантомом и большим коптером абсолютна одинакова. Если установить стик газа в среднее
положение - коптер зависнет на текущей высоте и будет удерживать ее, если мы находимся в режиме GPS или
в режиме удержания высоты по барометру.
1. Переключатель полетных режимов:
- положение "вверх" - FailSafe - принудительный возврат летательного аппарата в точку старта.
- среднее положение - удержание высоты по барометрическому датчику
- положение "на себя" - удержание высоты по бародатчику + удержание позиции по GPS-координатам.
2. Если собираетесь использовать функцию автоматического возврата, то обязательно. Кроме того, без записанной точки "дом" телеметрия не будет показывать направление возврата домой.
3. При потере сигнала коптер автоматически вернется в точку старта, если точка записана. Просто в режиме GPS
ничего никуда возвращаться не должно.
4. При потере сигнала от аппаратуры р/у коптер вернется домой, при просадке аккумулятора можно настроить
автоматическую посадку.
5. После того, как вы взлетели, в среднем положении стика газа коптер должен удерживать высоту. Логика управления на 100% соответствует тому, что вы видите на Фантоме.
6. Полет по точкам - для прерывания маршрута тумблер ВПР в среднее положение и далее ручной режим и всё?
7. - после перехода в ручной режим и приближении коптера к дому возможно ли опять переключить в режим GPS для автовозврата домой?
Продается гексакоптер , изготовлен в декабре 2013г. Новый.
Жалко, что простаивает, а кто-то мог бы и полетать.
|
#1 - 12 мая 2016, четверг
|
|||||||
|
Посетитель

Сообщений: 1
Екатеринбург
3180 дней назад
|
0
Прикрепленные файлы:
Редактировалось: 6 раз (Последний: 12 мая 2016 в 09:40)
|
||||||

Случайные статьи
Рекомендации и купоны
Новые видео о дронах - ежедневные обновления!




RC модельное видео
Новости форума
26 декабря 2024 |
|
Nikita отвечает в теме «APM 2.б» на форуме «Полетные контроллеры» |
Подскажите, пожалуйста, кто может помочь. Хочу подключить регулятор к полетнику, вот такие. Возможно ли это? |
||
24 декабря 2024 |
|
Nikita отвечает в теме «Писк регуляторов» на форуме «Моторы и регуляторы» |
Подскажите, пожалуйста, кто может помочь. Хочу подключить регулятор к полетнику, вот такие. Возможно ли это? |
||
28 октября 2024 |
|
nZr начинает тему «Продам квадрокоптер X210RF 14т.р» на форуме «Куплю - продам» |
Классическая рама 5 дюймов Realacc X210Pro, полётник RaceFlight Revolt F4 V2 32KHz,, камера Foxeer Falkor 3 Mini 1200TVL, видеопередатчик Eachine TS5828-S 40CH 5.8G 600mW. На борту стоит... |
||
31 августа 2024 |
|
pilon707 начинает тему «Квадрокоптер Walkera Rodeo 150 двигатели не работают» на форуме «Покупные квадрокоптеры» |
Во время полета квадрокоптер ударился о дерево и упал... когда я пытался взлететь после этого.... двигатели не вращаются. Что это ESC сгорел? |
||
27 августа 2024 |
|
pilon707 отвечает в теме «Пульт DEVO 7 и приемник к DEVO RX701» на форуме «Другая электроника» |
Посмотри тут https://walkerahelicopter.proboards.com/thread/8/binding-devo-tx-rx |
||
27 августа 2024 |
|
pilon707 отвечает в теме «Квадрокоптер Walkera Rodeo 150 не биндится приемник» на форуме «Покупные квадрокоптеры» |
Нашел тут...все биндится https://walkerahelicopter.proboards.com/thread/8/binding-devo-tx-rx |
||
12 июля 2024 |
|
Ruslan.R начинает тему «Прошу совета по настройке» на форуме «Самодельные проекты» |
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно... |
||
Поиск
YouTube канал сайта

Самые читаемые статьи










