Сделать квадрокоптер своими руками можно из чего угодно! Квадрокоптеры собирают из линеек, из коробки, из труб, даже из бумаги. А на этот раз - самодельный квадрокоптер был собран из лего конструктора!
Самое сложное в этой сборке - отобрать у ребенка конструктор вертолета Lego 60193 Arctic Air Transport, а сделать из нее действующую модель квадрокоптера уже не сложно! Основной задачей при изготовлении квадрокоптера, помимо летных качеств, было сохранить как можно больше оригинальных частей.
Видео полетов этого самодельного дрона вы можете посмотреть в конце статьи.
Итак, для изготовления такого квадрокоптера мастер использовал следующие
Инструменты и материалы
-Вертолет :
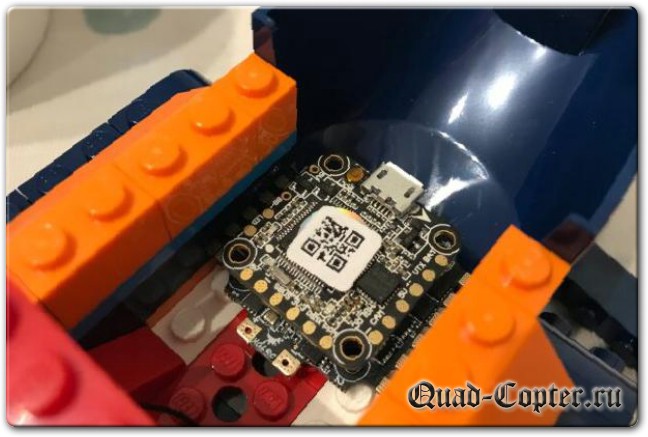
-Контроллер и ESC 20x20 мм, например, HGLRC XJB F428 Micro F4 AIO OSD:
Сначала мастер собирает LEGO-Arctic. Затем модель частично разбирается. Внутри нужно разместить батарею и контроллер, соблюдая балансировку модели.
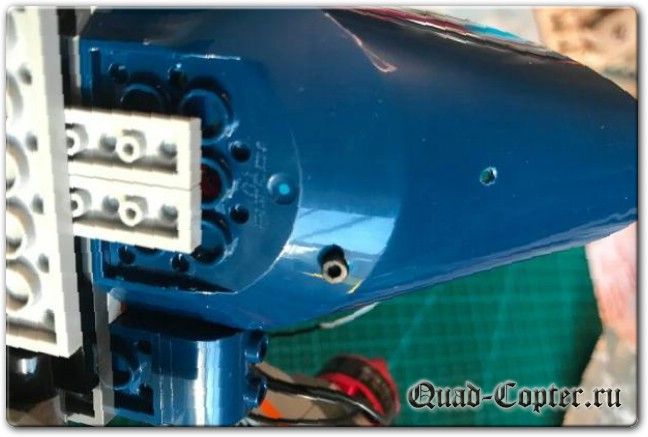
Шаг второй: крепление двигателя
Расположение крепежных отверстий стандартного бесщеточного мотора 1806 практически такое же, как и у шпилек на стандартной пластине LEGO 2x2. Каждое крепление «двигателя» на квадрокоптере имеет плитку темно-серого цвета 2x2 (LEGO 3022) и сверху плитку светло-серого цвета 2x2 с вертикальным штифтом (LEGO 2460), которая обычно удерживается на ступицах пропеллера LEGO.
Мастер сверлит крепежные отверстия. На моторах, по центру имеется отлив. По центру плитки сверлится отверстие под нее. Закрепляет двигатели.
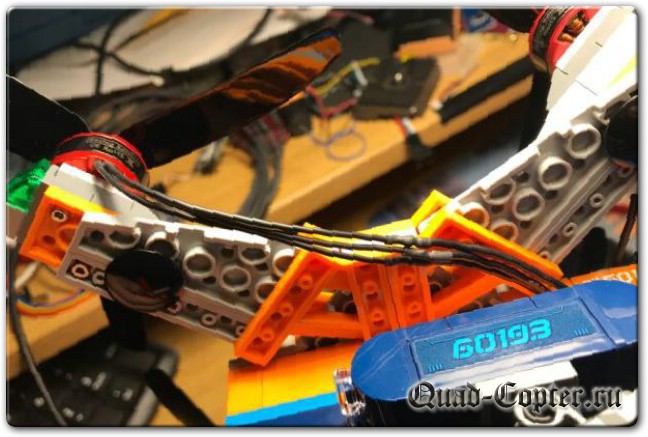
Шаг третий: плечи
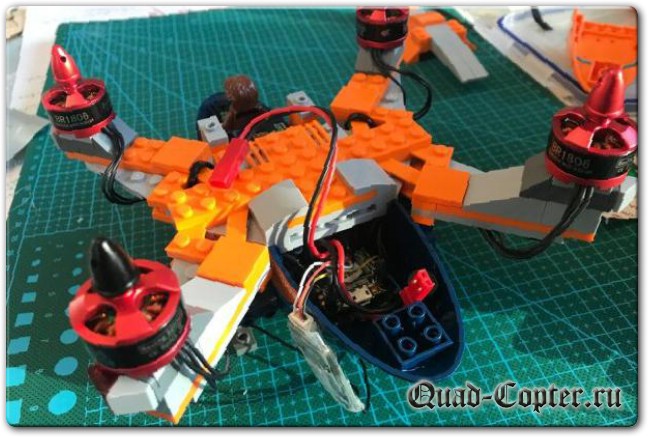
Переставляя «плечи» квадрокоптера, можно немного изменить компоновку, чтобы обеспечить более широкое или более узкое расположение двигателей и расположение винтов относительно друг друга.
Стандартная сборка LEGO (первое фото) имеет «плечи» и двигатели, расположенные широко (горизонтально) с довольно большим перекрытием винтов. Мастер переделывает «плечи» и разводит двигателя и, соответственно, винты.
Шаг четвертый: электроника
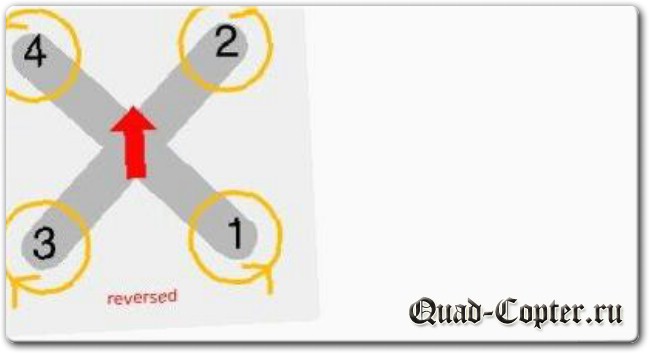
Согласно схемы производит монтаж электроники. На первом фото приведена схема направления вращения двигателей. Направление вращения, так же, можно будет изменить на этапе программирования.
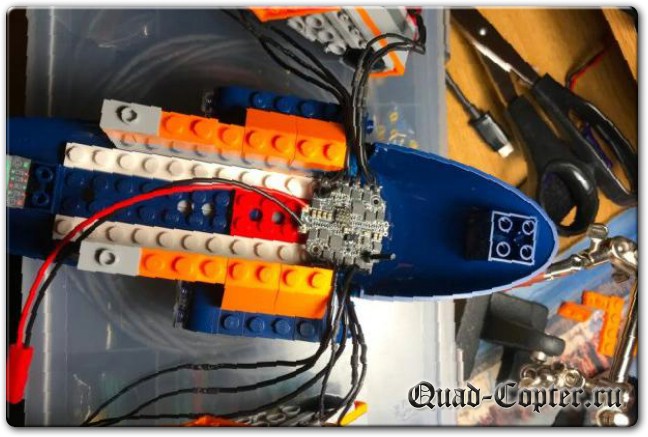
После того, как монтаж завершен, и перед подключением батареи, мастер проверяет соединения, во избежания обрыва или замыкания.
При включении питания вы должны увидеть включенные огни контроллера полета и несколько звуковых сигналов от ESC.
Шаг пятый: настройка
Теперь, когда все подключено, пришло время настроить контроллер. Это означает загрузку программного обеспечения (встроенное программное обеспечение), которое выполняет задачу декодирования управляющих сигналов от передатчика RC, обработки входного сигнала датчика (ускоритель, гироскопы) и предоставления управляющих сигналов для ESC для вращения двигателей с заданной скоростью.
Снимите пропеллеры для безопасности! Батарея не требуется для первых нескольких шагов настройки, только питание USB.
Подсоедините кабель micro USB к контроллеру полета. Обратите внимание, что это может быть легче сделать, если контроллер не прикручен к корпусу
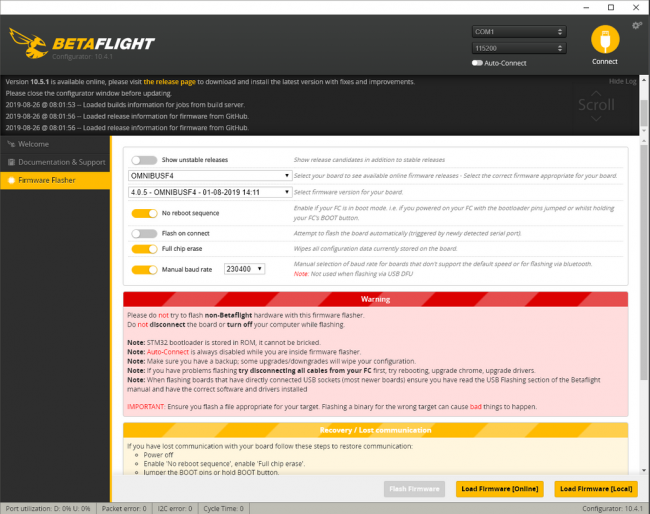
Скачайте и залейте соответствующую прошивку для контроллера полета.
Нажмите кнопку «Подключить» и установите следующие настройки:
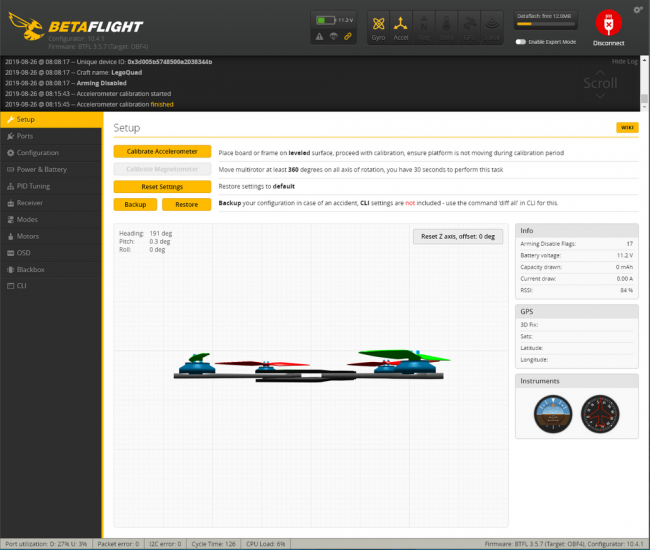
1. Настройка - калибровка двигателей по модели
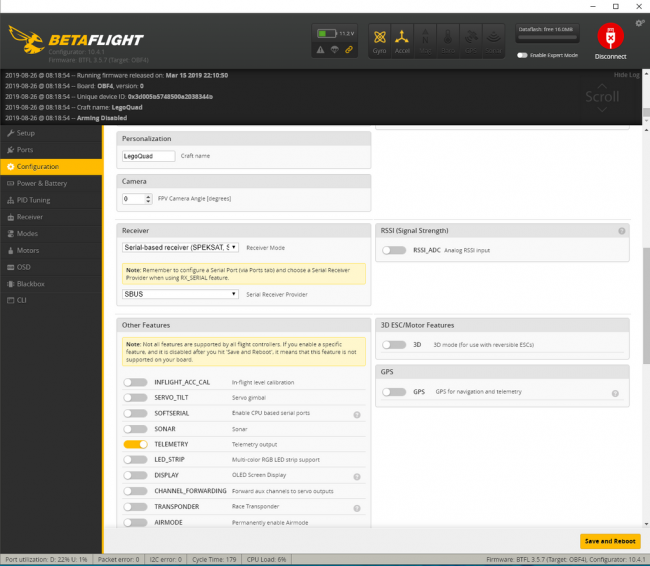
2. Укажите порты - UART1 - Serial RX для подключения SBUS RC-ресивера
3. Сохранение и перезагрузка
4. Установите связь между приемником и передатчиком
5. Перегрузите
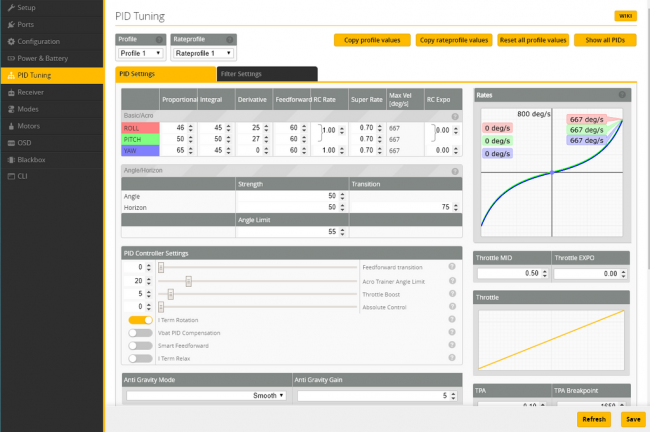
6. Значение для ПИД мастер задает равное 250
7 Подключите батарею
8. Отрегулируйте напряжение.
9. Убедитесь, что ваше отображение каналов и направление управления правильные, когда все настроено, изображение квадракоптера модели в правом нижнем углу должно перемещаться во всех правильных направлениях при перемещении джойстиков на контроллере RC.
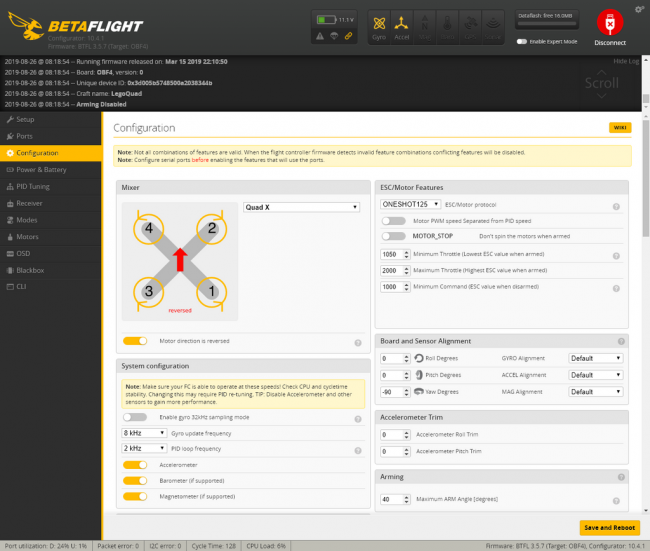
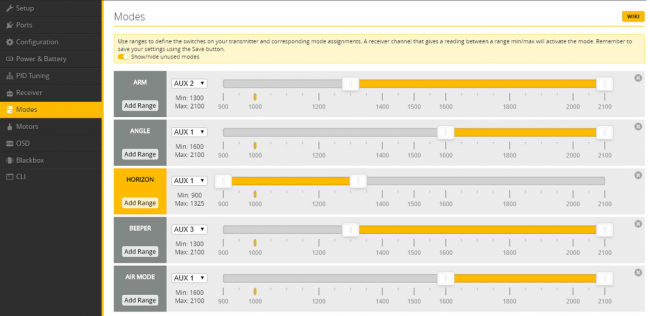
Настраивает режимы.
ARM вкл / выкл
HORIZON для самовыравнивания / ACRO для традиционного полета FPV
BEEPER - полезно, если вы потеряете модель в высокой траве или кустах.
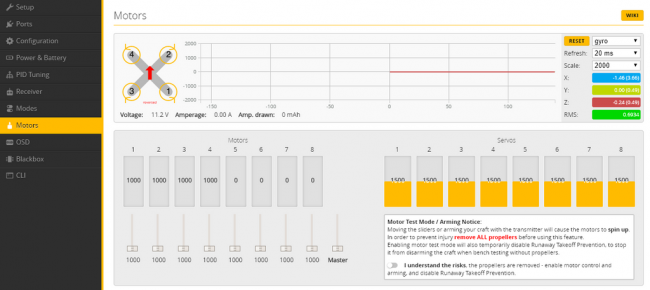
Вкладка «Моторы» - используйте эту опцию для проверки каждого двигателя в отдельности, и, что важно, отметьте направление вращения каждого из них
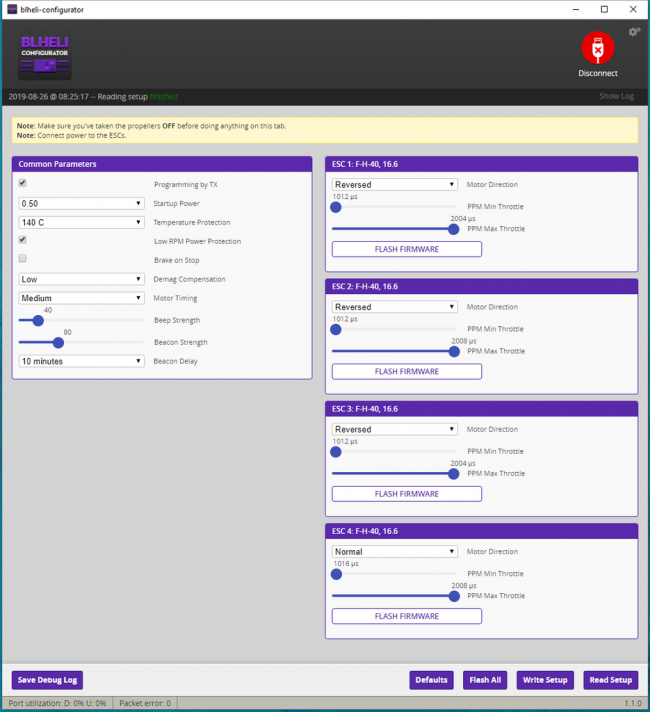
Исправьте любое неправильное направление вращения с помощью конфигуратора BLHELI
После всех этих шагов можно отключить USB и батарею, а затем включить питание и проверить, что все работает:
Включить передатчик и питание
Подключите батарею и установите квадрокоптер на ровном участке поверхности
Включите переключатель ARM, и моторы должны начать вращаться с низкой скоростью
Проверьте дросель увеличивая обороты
В горизонтальном режиме попробуйте наклонить квадрокоптер и убедитесь, что двигатели реагируют соответствующим образом, например, наклоните его вперед, и передние двигатели будут ускоряться.
Шаг шестой: окончательная сборка
Практически вся конструкция корпуса держится с помощью монтажных замков. Единственно при креплении моторов мастер использует термоклей.
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...