Появление синевупов было вопросом времени. Электроника мельчает, вес компонентов уменьшается и вот уже появился квадрик с FullHD-камерой, весом менее 50 грамм - Happymodel Mobula7 HD.
Это легкий аппарат на раме от Eachine Trashcan с камерой Caddx Turtle V2 и возможностью летать с 3S-аккумулятором. Спрос на этот квадрик был таким большим, что я смог его получить более чем через три месяца после начала продаж! Лучше поздно, чем никогда:)
Для кого будет интересна эта модель? Если вы планируете неспешные полеты внутри помещения, среди людей, в парке или сквере в тихую безветренную погоду - это ваш выбор. Да, квадрик может летать как гоночный на трех банках, но основная его цель - снять интересные кадры без ущерба для окружающей обстановки.
Краткие характеристики Happymodel Mobula7HD:
База: 75мм
Вес: 48г
Взлетный вес: 74г (со стоковым аккумулятором)
Габариты: 98x98x45мм
Полетный контроллер: Crazybee F4 PRO V2.0
Приемник: интегрированный (Frsky, Flysky, DSM2/DSMX) или внешний
Моторы: Happymodel EX1102 9000kV
Пропеллеры: 40мм четырехлопастные под вал 1мм
Камера: Caddx Turtle V2
Передатчик: 40 каналов, 25/100/200мВт
Аккумулятор: LiHV 300мАч/3S/30C c XT30-разъемом
Характеристики полетного контроллера Crazybee F4 PRO V2.0:
Процессор: STM32F411CEU6 (100MHZ, 512K памяти)
Гироскопы: MPU6000 на SPI-шине
Размер: 26x26мм
OSD: Встроенное BetaFlight OSD
Доступен SmartPort для управления видео-передатчиком
Прошивка блока регуляторов: BLHeli_S
Поддержка DShot600
Входящее напряжение: 1-3S
Номинальный ток: 5А
Максимальный ток: 6А
Характеристики камеры Caddx Turtle V2:
Сенсор: 1/2.7" CMOS
Формат видеосигнала: NTSC/PAL
Разрешение видео: 1080P@60fps/1080P@30fps/720@60fps
Напряжение питания:4.5-20В
Угол обзора по FPV: 155°
Угол обзора при записи: 170°
Разрешение сенсора: 2 Мегапикселя
Линза: 1.8мм Turbo Eye
Потребляемый ток: 380мА@5В/160мА@12В
Поддержка OSD
Формат записываемых файлов: MP4
Поддержка записи звука
Максимальный поддерживаемый объем SD-карты: 64ГБ
Квадрик приехал в классической упаковке от Happymodel. В такой же коробке приезжала обычная Mobula7. Сбоку наклейка с информацией о типе приемника у модели.
Внутри коробки есть вкладка из пористого материала, которая надежно защищает квадрик от повреждений во время транспортировки. Комплектация скромная: сам квадрик, один 3S-аккумулятор, дополнительный набор пропеллеров, инструкция, отвертка, бесполезный съемник для пропеллеров, переходник с двух PH2.0 на один XT30 для полетов на двух банках, запасные болтики и пультик для настройки камеры Caddx Turtle V2.
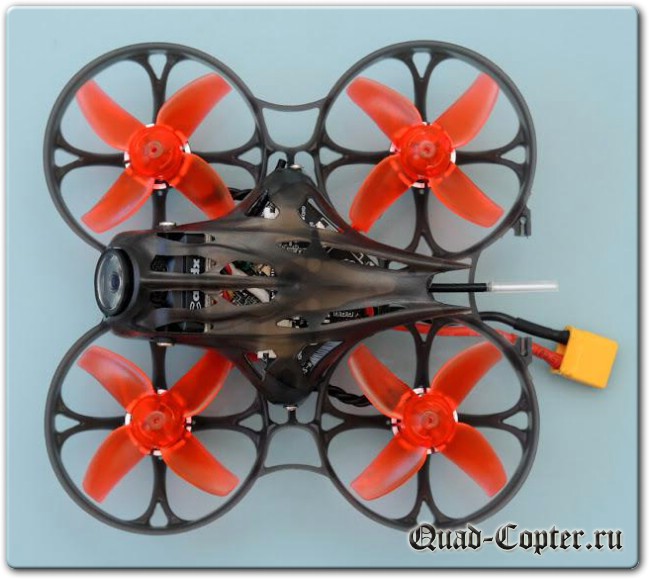
Первое впечатление - красивый:) Необычный дизайн канопы выглядит привлекательно. Видно, что дизайнеры старались. Камера вынесена вперед и при таком ее расположении пропеллеры не будут попадать в кадр. Угол камеры можно регулировать в довольно широких пределах.
Рама с диагональю 75мм - уже знакомая по Eachine Trashcan, но есть нюанс, о чем ниже. Да и пропеллеры те же самые. Канопа фиксируется тремя винтиками, причем передний вкручивается прямо в распорку на раме.
По бокам канопа крепится винтиками к специальным пластиковым стоечкам, которые будет видно, когда сниму канопу. В задней части рамы есть место для установки управляемых светодиодов, но производитель пошел на странное решение - установить единственный светодиод с отдельным контроллером напряжения в верхней части канопы.
Кнопка управления камерой выглядывает из под канопы слева. До нее можно дотянуться пальцем, чтобы запустить запись на камере, но этого не потребуется. Настрою камеру так, чтобы запись стартовала тумблером с пульта.
Под канопой с правой стороны выглядывает слот для SD-карты. Доступ к нему относительно свободный, но, как и у Beta85X HD, флешка ничем не зафиксирована и может потеряться при аварии.
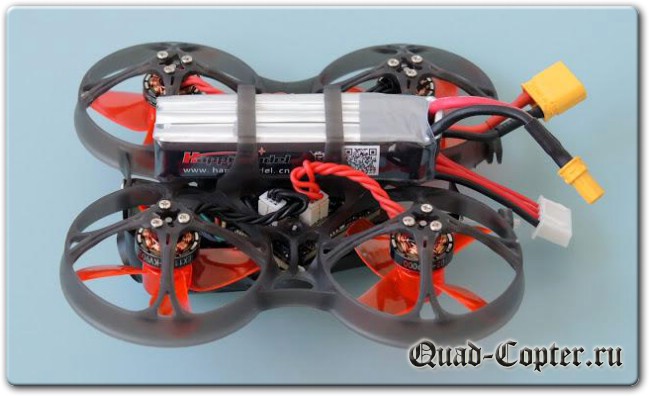
Снизу Happymodel Mobula7 HD мало отличается от Eachine Trashcan. Слот под аккумулятор точно такого же размера. Только силовой провод с XT30-разъемом. В такой слот влезают два однобаночных аккумулятора на 450мА/ч, либо стоковый.
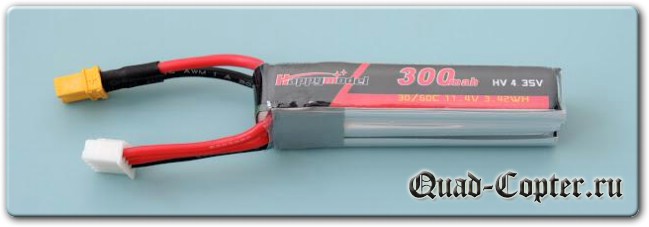
Стоковый аккумулятор 300мА/ч/3S/30C весит 25.65 грамм. Производительность его более чем скромная, но увы, другой альтернативы, способной поместиться в холдер рамы, пока нет.
Аккумулятор вставляется в холдер с заметным усилием. Не понимаю, почему все, как один, производители пауервупов (Happymodel/Eachine/BetaFPV) рогом уперлись именно в этот размер холдера? Неужели нельзя что-то более универсальное придумать, чтобы выбор аккумуляторов был шире? Например, под эту модель гораздо лучше зайдут аккумуляторы на 350mA/ч. Так и придется срезать этот холдер и ставить ремешок или печатать какой-либо хомут!
Изначально квадрик Happymodel Mobula7 HD поставлялся с 1102-моторами на 10000kV, но после жалоб пользователей о воспламенении полетного контроллера из-за слишком высоких токов на максимальном газу, модель стали комплектовать менее оборотистыми моторами на 9000kV. Мне досталась уже новая версия. Для пользователей с моторами на 10000kV рекомендовано ограничить максимальный газ в настройках полетного контроллера до 75%.
Снял один из моторов и разобрал. Моторы такого размера производят полностью с подшипниками. Выходной вал диаметром 1мм. Сверху на валу стоит стопорное кольцо - все по феншую. Ротор очень легкий, моторы будут легки на подхват. Вес одного мотора 2.95 грамма.
Начинаю потихоньку разбирать квадрик. Сначала откручиваю три винтика и осторожно приподнимаю канопу. Передатчик закреплен внутри канопы на два винта и соединен с полетным контроллером пучком проводов на разъеме. К камере подведено напряжение питания 5В от полетного контроллера через передатчик. Основной блок камеры стоит поверх полетного контроллера.
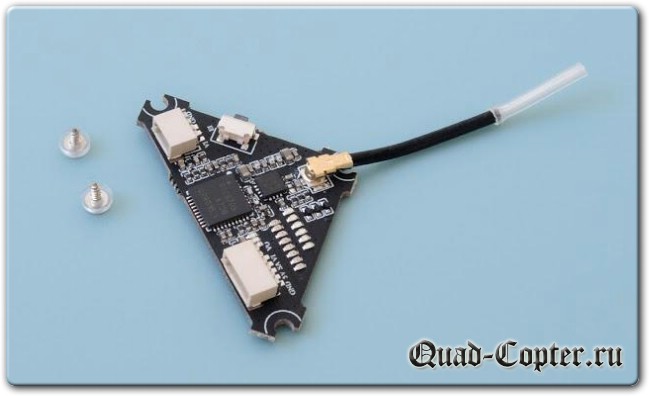
Снимаю передатчик. Он точно такой же, как стоял на Eachine Trashcan. С антенной весит 2.35 грамм. Передатчик с переключаемой мощностью 25/100/200мВт, на 40 каналов.
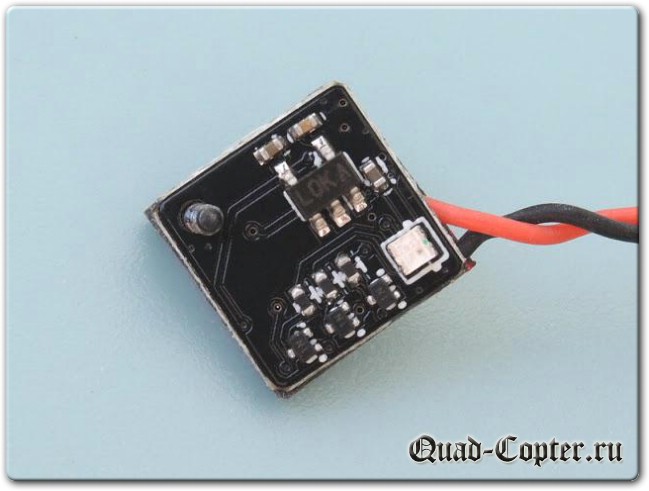
Над передатчиком стоял контроллер напряжения с цветным светодиодом. Он припаян прямо к силовым пятачкам на полетном контроллере. К канопе крепится единственным винтиком. При просадке напряжения светодиод будет мигать красным, при нормальном напряжении будет зеленым.
Камера крепится в канопе через плотные пластиковые колечки парой винтиков. Если прикинуть вес вместе с крепежом, то получается 2.75 грамм, а без крепежа 2.55 грамм.
Внутри канопы над индикатором есть наклейка, чтобы подсветка выглядела более привлекательной, только пилот этого не увидит:)
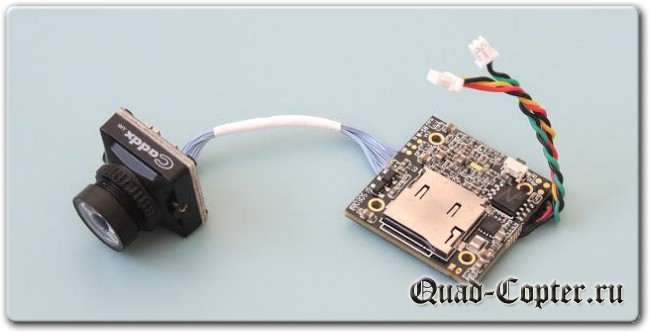
Камера весит 13.2 грамма. Сенсор соединен с основным блоком коротким шлейфом длиной 55мм. Изначально предполагается управление камерой только с внешнего пультика.
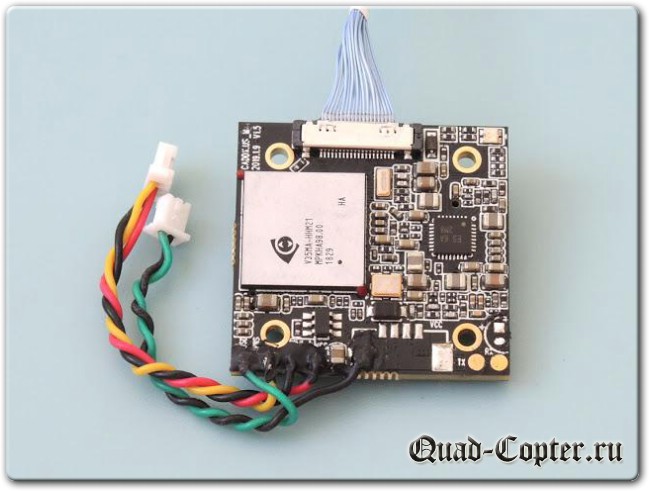
Основной блок камеры претерпел некоторые изменения. Удален разъем, отсутствует микрофон. Провода питания и вывод видеосигнала подпаяны к контактным площадкам.
Камера установлена на пластиковые стоечки, к которым крепится еще и канопа. Снять с рамы эти стоечки не просто, потому что крепежные отверстия развальцованы винтиками. А не снимая их, невозможно извлечь из рамы полетный контроллер.
Чтобы снять стоечки, надо несколько секунд погреть их сверху паяльным феном, установленным на 200 градусов. Пластик станет чуть более гибким и детали легко снимутся с рамы.
После того, как снял полетный контроллер, отличие рамы этого квадрика от Eachine Trashcan стало заметнее. В передней части кольца защиты пропеллеров с внутренней стороны имеют дополнительные стенки, которые не выглядят родными, а как бы наставленными на скорую руку. Их добавили для того, чтобы при авариях пропеллеры не повредили провода, выходящие от полетного контроллера к передатчику.
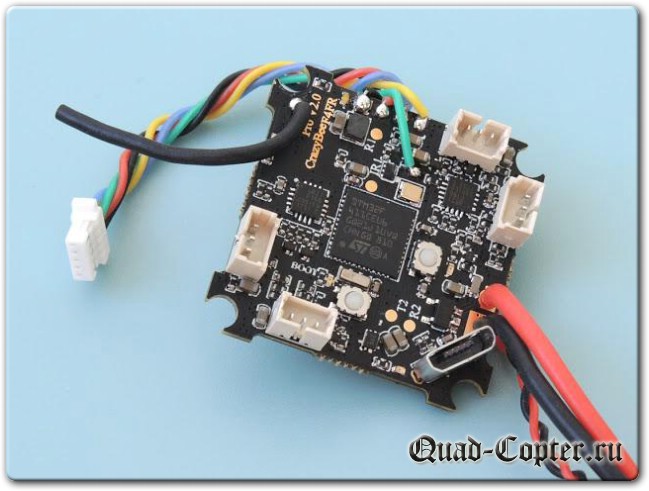
Остался полетный контроллер. Это уже знакомая модель Crazybee F4 Pro, только немного более усовершенствованная. Увеличены размеры кнопок Boot и Bind, хотя ни той, ни другой еще не приходилось пользоваться:) Контакты T2 и R2 - это выводы UART2, буду их использовать для управления камерой. От R2 брошу провод на пятачок T1 камеры, а от T2 - на R1.
С полетным контроллером есть небольшая проблема. Как отмечали некоторые пользователи, при подключении 3S-аккумулятора бывали случаи выгорания стабилизатора на 5В. Производитель рекомендовал добавить конденсатор 100мкФ/16В на силовой XT30-разъем, даже выпустил апгрейдный вариант силового провода с уже установленным конденсатором. В момент подключения аккумулятора конденсатор будет поглощать скачек напряжения и с полетным контроллером ничего не случится. А мне пришлось самостоятельно это сделать и вот что получилось.
Силовые провода вывел сверху и припаял под углом к XT30-разъему. А конденсатор на 100мкФ/16В разместил между проводами. Контакты изолировал термоклеем. При таком подходе силовые провода не будут надламываться в местах изгиба. И да, пропеллеры переставил на вращение в обратную сторону, так привычнее.
В дополнение ко всему, вывел антенну приемника наружу. Антенна у квадрика была расположена не в лучшем месте и при первых же полетах аппарат падал в нескольких метрах с сообщением RXLOSS на OSD.
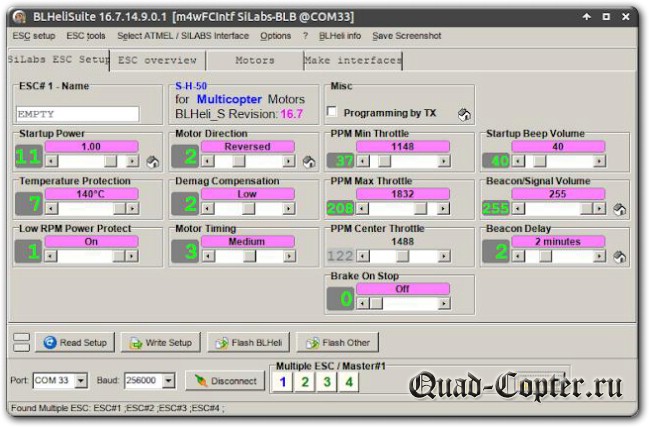
Следующий этап - настройка регуляторов и проверка направления вращения моторов. Все моторы были настроены на нормальное вращение и все пришлось реверсировать. Поднял громкость маяка на максимум и уменьшил время срабатывания до двух минут.
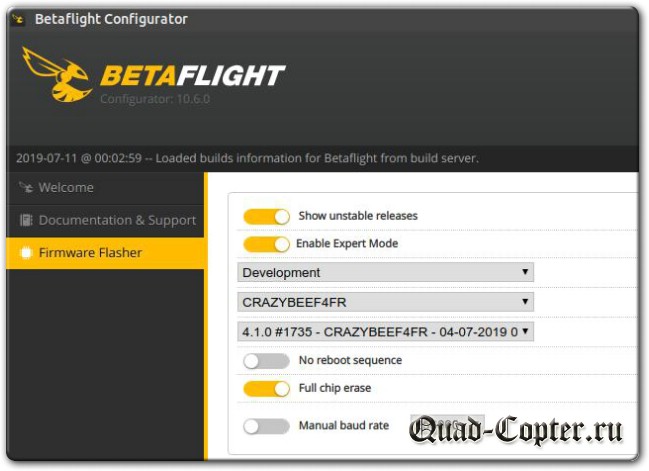
Изначально в Happymodel Mobula7 HD стояла древняя-древняя предварительная версия BetaFlight-4.0.0, вот настройки этой версии. Буду ставить последнюю тестовую версию BetaFlight-4.1.0. Надеюсь, получится ее настроить, иначе придется откатываться на версию 3.5.7.
Производитель не поленился и опубликовал базовые настройки для Happymodel Mobula7 HD под различные версии прошивки у себя на сайте. Решил попробовать настроить квадрик на их основе.
Сначала забиндил квадрик с пультом в режиме D16 на 8 каналов без телеметрии. Ввел в консоли конфигуратора BetaFlight команду:
bind_rx_spi
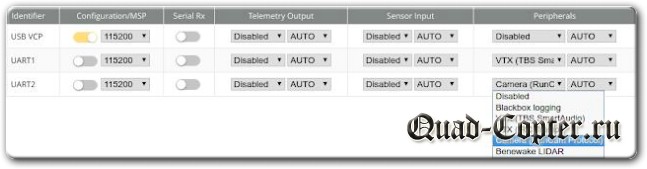
После привязки пульта, дополнительно включил управление камерой на UART2 и сразу же проверил доступность управления камерой.
В камере стоит наиболее свежая на сегодняшний день прошивка с полной поддержкой RunCam-протокола от 24 января 2019 года, настройки камеры доступны через команды стиками, как и в функции camera control - очень удобно.
И запускостановку записи можно назначить на отдельный тумблер, привязанный к свободному AUX-каналу.
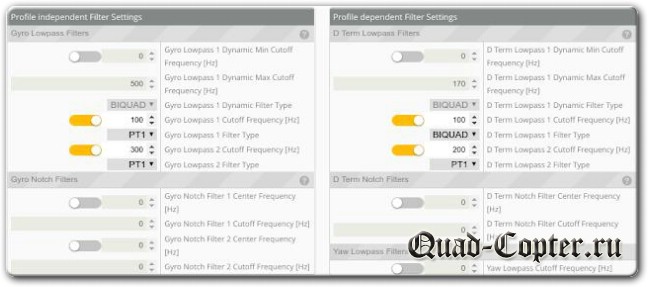
В фильтрах выключил динамическую LPF и D-Term фильтрацию и задал статическую, как была на версии BetaFlight-3.5.7.
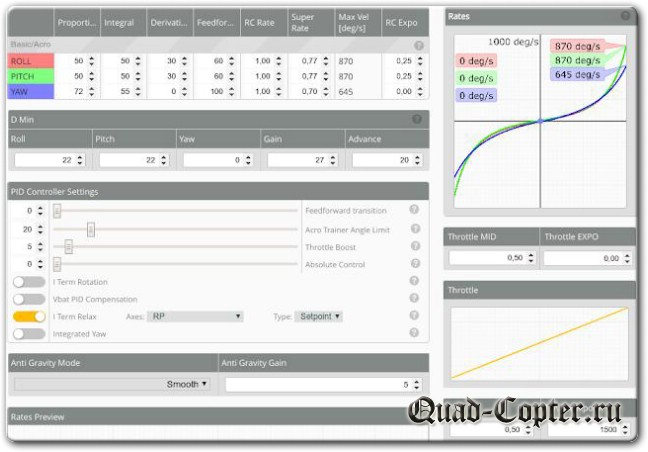
В PID-ах выставил рекомендованные производителем значения, полетал с ними и понял, что по осям лучше выставить одинаковые значения, иначе по Roll уж очень сильно квадрик ветром колбасило.
Остальные настройки самые обычные, их полный список ниже:
# reset configuration to default settings
defaults nosave
# feature
feature -TELEMETRY
feature -AIRMODE
# beeper
beeper -ALL
# beacon
beacon RX_LOST
beacon RX_SET
# serial
serial 0 2048 115200 57600 0 115200
serial 1 16384 115200 57600 0 115200
# aux
aux 0 0 0 1900 2100 0 0
aux 1 13 1 1400 1600 0 0
aux 2 28 0 1900 2100 0 0
aux 3 33 3 1900 2100 0 0
aux 4 35 1 1900 2100 0 0
# adjrange
adjrange 0 0 2 900 2100 12 2 0 0
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 2
vtxtable powervalues 0 1
vtxtable powerlabels 25 200
# master
set gyro_lowpass_hz = 100
set gyro_lowpass2_hz = 300
set dyn_lpf_gyro_min_hz = 0
set acc_hardware = NONE
set blackbox_device = NONE
set dshot_idle_value = 600
set motor_pwm_protocol = DSHOT600
set vbat_max_cell_voltage = 450
set vbat_min_cell_voltage = 295
set vbat_warning_cell_voltage = 315
set ibata_scale = 1175
set yaw_motors_reversed = ON
set yaw_deadband = 5
set pid_process_denom = 1
set osd_cap_alarm = 450
set osd_tim1 = 1792
set osd_tim2 = 1025
set osd_vbat_pos = 14721
set osd_rssi_pos = 14394
set osd_tim_2_pos = 14743
set osd_throttle_pos = 6541
set osd_current_pos = 4513
set osd_mah_drawn_pos = 4536
set osd_motor_diag_pos = 396
set osd_craft_name_pos = 33
set osd_display_name_pos = 33
set osd_debug_pos = 4481
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set vtx_band = 5
set vtx_channel = 8
set vtx_power = 2
set vtx_freq = 5917
set vcd_video_system = NTSC
profile 0
# profile 0
set dyn_lpf_dterm_min_hz = 0
set dterm_lowpass_hz = 100
set dterm_lowpass2_hz = 200
set p_pitch = 50
set i_pitch = 50
set d_pitch = 30
set f_pitch = 60
set p_roll = 50
set i_roll = 50
set d_roll = 30
set f_roll = 60
set p_yaw = 72
set i_yaw = 55
set f_yaw = 100
set d_min_roll = 22
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set roll_expo = 25
set pitch_expo = 25
set roll_srate = 77
set pitch_srate = 77
# restore original rateprofile selection
rateprofile 0
# save configuration
save
Отзывы на Happymodel Mobula7 HD
Впечатления от полета Happymodel Mobula7 HD несколько противоречивые. Лучше сначала посмотреть видео (исходный файл прилагается). Нормально на улице полетать так и не удалось, каждый день дует довольно сильный ветер - погода меняется, похолодало.
На двух банках летать в такой ветер сложно, квадрику очень не хватает мощности. На трех банках вполне допустимо, но все равно квадрик будет сдувать при сбросе газа. В помещении на двух банках Happymodel Mobula7 HD ведет себя как несколько тяжеловатый тинивуп. Летит неспешно, точно, предсказуемо - очень понравилось. Можно смело и без страха летать в тесном помещении и среди людей. Но на этой модели лучше не падать:)
Теперь о проблемах. Первое, с чем пришлось столкнуться - это потеря управляющего сигнала. Антенна приемника закопана так глубоко в недра квадрика, что сигнал терялся чуть ли не в пяти метрах. Частично удалось решить проблему, вынеся приемную антенну за пределы квадрика. Но и в этом случае один раз словил RXLOSS в менее чем пятидесяти метрах от себя.
Странно, полетный контроллер не сильно отличается от того, что стоит на Eachine Trashcan, но на нем такого не происходило. Из-за этой проблемы на улице боялся летать активно. Не хотелось разложить квадрик в первые же минуты:)
Следующая проблема - слабая канопа. Было достаточно одного скромного падения с полуметра, чтобы отломилось одно из боковых креплений. Спасение нашлось в виде клея, застывающий от ультрафиолета.
Периодически, при посадке с холдом с высоты в несколько сантиметров, камера зависала и уходила в серый экран. Помогала только перезагрузка квадрика по питанию. Перетряс все провода, шлейф от камеры - не помогает. Потом присмотрелся и, как мне показалось, один из конденсаторов на передатчике мог касаться холдера SD-карты на плате камеры. Надо попробовать заклеить часть платы каптоном, возможно проблема уйдет. Пока не пробовал так сделать, ибо канопа приклеена намертво:)
Осталась последняя досадная проблема - камера дает желе. В месте крепления камеры пробовал ставить вместо пластиковых шайбочек силиконовые колечки, подкладывал под камеру кусочек пористого материала - не помогает, желе все равно остается. Обратил внимание, что желе присутствует только на ярких участках кадра. При нормальном освещении никакого желе нет. Ага, то есть камере не нравится слишком яркий свет и надо его ограничить. В этом помогут ND-фильтры. Устанавливаются они прямо на объектив камеры, но придется немного модифицировать канопу.
Еще один момент по камере. В прошлом обзоре по Beta85X HD включал камеру в PAL-режим и картинка в очках была как бы слегка рваная. Тогда предположил, что такое поведение камеры возможно из-за не кратной частоты кадров при записи видео и при выводе на передатчик. Предположение подтвердилось. В этот раз включил NTSC-режим и картинка по FPV стала гладкая, без рывков.
Итак, что имеем в итоге. Если бы не ряд вышеозначенных проблем, квадрик Happymodel Mobula7 HD был бы одним из самых интересных в своем классе. А при весе менее 50 грамм - и самым легким.
Здравствуйте! Никак не могу разобраться, для Mobula 7 HD со стоковой линзой "1.8mm Turbo Eye"(внешний диаметр 13мм), какой нужен диаметр фильтров ND8/ND16 14 мм или 15 мм? С уважением, Алексей.
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...