Тинивупами занимаюсь уже несколько лет. Получил огромный опыт и почву для размышлений о том, как же заставить эти мелкие квадрики нормально летать :)
Несколько раз пытался сделать легкий тинивуп с бесколлекторными моторами на 65-й раме с питанием от 1S-аккумулятора, но каждый раз упирался в небольшое время полета и слабый подхват по газу. Совсем недавно испытал новый пауервуп от BetaFPV, что навело на некоторые интересные мысли.
Квадрик Beta85Pro 2 летел не быстро, но очень уверенно, расход аккумулятора и токи были довольно скромные, а подхват по газу был просто замечательный! В общем, модель была очень энергоэффективной.
И вот, пазл в голове сложился. Из 1S-аккумулятора на 300-350мА/ч нормальных токов не выжать. Вместо того, чтобы пытаться заставить летать квадрик на 65-й раме с прожорливыми 0802-моторами на 22000-25000kV, не лучше ли будет собрать модель на 75-й раме, с минимально возможным весом, не сильно оборотистыми моторами на 17500kV и легкими пропеллерами? Решил попробовать, а результат назвал MCHeliWhoop:)
За основу взял самую легкую раму с диагональю 75мм - Happymodel Mobula7 V2 весом 4.25 грамма. Полетный контроллер - Racerstar Crazybee F3 FR, весом 2.9 грамма без разъемов под моторы. Камера Caddx Beetle с небольшими доработками, как самая легкая и качественная на сегодня. Поставил пропеллеры HQ на 40мм под вал 1мм, так же как самые легкие в своем классе.
С моторами вышел небольшой казус. Изначально хотел поставить 0802-моторы от BetaFPV на 17500kV, но в процессе установки оборвал одну фазу у мотора. Попробовал подпаять вывод к остатку провода, торчащему из статора - не смог. Провод был слишком короткий и тонкий, стал его зачищать от лака и обломил под корень. Попутно оборвал еще одну фазу:) Ладно, решил попробовать перемотать, опыт есть. Когда разматывал мотор, насчитал по 10 витков на зуб проводом 0.2мм. Обмотки соединены звездой. До этого самые маленькие моторы, что перематывал, были 1103, а 0802-моторы перематывал впервые, но все получилось с первого раза! Провод легко уложился в два слоя на зуб: снизу вверх 6 витков, сверху вниз еще 4 витка. Даже утрамбовывать не пришлось. Перемотал за 15 минут.
Намотка не самое сложное. Больше всего проблем потом с зачисткой выводов от лака. Целый вечер экспериментировал с флюсами, аспирином, кислотой и просто высокой температурой паяльника. Увы, ничего из этого не дало хорошего результата. Так и пришлось аккуратно зачищать модельным ножиком с риском оборвать выводы, по другому никак.
После перемотки мотор заработал, но характеристики его изменились. По звуку на максимальном газе моторы пели чуть выше, чем такие же на 19000kV. Точно измерить нечем, могу только предположить, что получилось где-то 19500kV, а было 17500kV. Вот что качественная намотка провода с мотором делает!
Это что же получается, один мотор у меня будет мощнее других? Непорядок! Ну, вы понимаете, чем все закончилось...
На самом деле, с моторами я немного перегнул палку:) Можно было просто поставить Happymodel SE0802 на 19000kV и получить тот же эффект. Чуть позже соберу еще один вариант с ними и сравню.
Полетный контроллер установил вверх ногами, чтобы выводы под моторы и контакты для камеры были сверху - так удобнее собирать. Силовой провод толщиной 24AWG, с угловым PH2.0-разъемом с цельными пинами.
Позже заменю полетный контроллер на новенький BetaFPV F4 1S. Это позволит еще на полграмма уменьшить вес квадрика, а если оставить разъемы под моторы, то вес не изменится, а удобства в обслуживании прибавится.
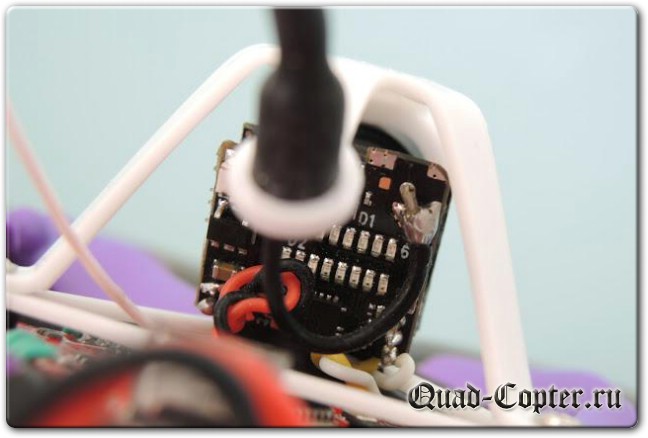
Камеру Caddx Beetle пришлось немного модифицировать. Мне необходимо было, чтобы кабель антенны шел сверху вниз, образовывая петлю. Поэтому отпаял антенну и надфилем сточил выступ, к которому она припаивалась. С правого края передатчика снял лак и вывел антенну вниз. Антенна вклеивается в отверстие канопы. Петля не позволяет обломиться кабелю на выходе из передатчика.
Затем надо было разделить вход-выход видеосигнала между камерой и передатчиком. Это просто - надо перерезать нижний правый пин на камере. Пластик срезал модельным ножиком, а пин перепилил надфилем. С обоих концов подпаял кусочки провода - вот и получился выход с камеры на OSD (желтый провод) и вход с OSD на передатчик (белый провод).
Антенну приемника сделал новую из куска МГТФ-провода.
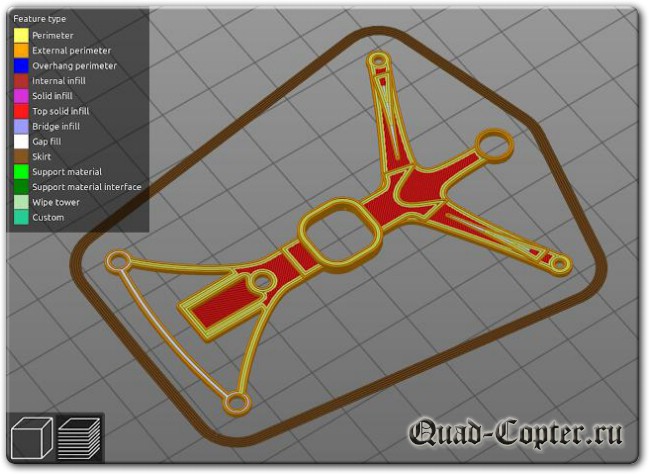
Крепление камеры распечатал на 3D-принтере из PETG-пластика и согнул с помощью паяльного фена. Камера насаживается на язычок, оклеенный толстым двухсторонним скотчем и держится очень крепко. Да, не лучший выбор материала для крепления. Больше подошел бы нейлон или что-то более вязкое, что хорошо держит ударные нагрузки. При ударах PETG раскалывается, как карамель.
Крепление спроектировано так, что в конструкцию заложены линии сгиба. Если нагревать пластик в этих линиях, то он согнется, как по шаблону. Надо только поймать точку начала размягчения пластика. У PETG-пластика это 140 градусов.
Скачать крепление камеры TinyWhoop дрона можно тут.
Модель крепления проектировал с использованием OpenSCAD и Inkscape с учетом следующих параметров печати: сопло 0.4мм, слой 0.15мм, 100% заполнение, периметр 3 штуки, ретракт 3мм, температура сопла 235, температура стола 70, без обдува. Печатал на небольших скоростях 20-25мм/c.
Итоговый вес MCHeliWhoop получился 21.44 грамма! Не каждый тинивуп на 65-й раме может похвастаться такой стройной фигурой:) С аккумулятором Infinity LiHV 300mAh/40C взлетный вес 29.2 грамма. Кто меньше? Можно еще на полграмма сбросить вес, если заменить антенну-диполь на монополь, но диполь как-то более правильный. Не поленился и проверил тягу моторов на полном газу. Получилось 87 грамм. Ничего себе, тяга моторов почти в три раза больше веса квадрика! Это реально круто для тинивупа!
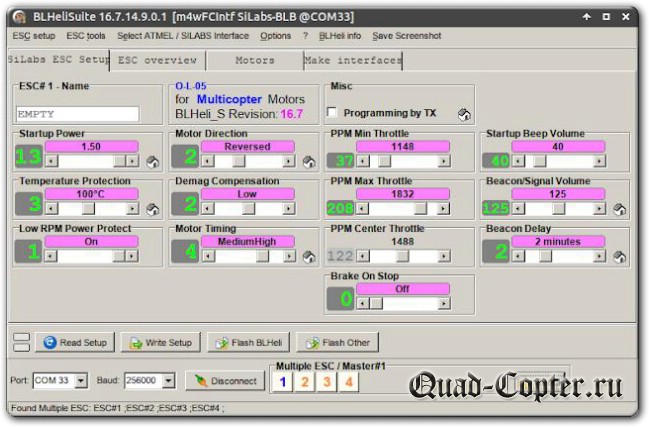
В настройке регуляторов поднял StartupPower на максимум и тайминг поставил на MediumHigh. Кстати, какую бы громкость маяка не ставил, все равно моторы пищат очень-очень тихо. В помещении еще можно услышать, но на улице квадрик по писку будет не найти - проверено. Один раз упал в траву на газон, ходил в метре от квадрика и не слышал писка моторов.
В полетный контроллер залил прошивку BetaFlight-3.5.7. В настройках пришлось развернуть полетный контроллер на 180 градусов по роллу и перемапить выводы моторов 1-3 и 2-4. Протокол управления выбрал FrSky D8, с ним наибольшая дальность получается. Акселерометр отключен за ненадобностью - не пробовал в стабилизации летать. Полный дамп настроек ниже.
resource MOTOR 1 A03
resource MOTOR 2 A02
resource MOTOR 3 B08
resource MOTOR 4 B09
feature -TELEMETRY
beeper -ALL
beacon RX_LOST
beacon RX_SET
aux 0 0 0 1900 2100 0 0
aux 1 1 2 1900 2100 0 0
aux 2 13 1 1400 1600 0 0
aux 3 28 0 1900 2100 0 0
aux 4 35 1 1900 2100 0 0
aux 5 47 2 1400 1600 0 0
set acc_hardware = NONE
set rc_interp = OFF
set rx_spi_protocol = FRSKY_D
set blackbox_device = NONE
set dshot_idle_value = 650
set motor_pwm_protocol = DSHOT300
set align_board_roll = 180
set vbat_max_cell_voltage = 46
set vbat_min_cell_voltage = 31
set vbat_warning_cell_voltage = 33
set beeper_dshot_beacon_tone = 4
set yaw_motors_reversed = ON
set osd_cap_alarm = 450
set osd_tim1 = 1792
set osd_tim2 = 1025
set osd_vbat_pos = 2497
set osd_rssi_pos = 2105
set osd_tim_2_pos = 2518
set osd_anti_gravity_pos = 465
set osd_throttle_pos = 2508
set osd_current_pos = 417
set osd_mah_drawn_pos = 439
set osd_craft_name_pos = 2081
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set vcd_video_system = PAL
profile 0
set dterm_notch_cutoff = 0
set anti_gravity_gain = 2000
set iterm_relax = RP
set iterm_relax_type = SETPOINT
set iterm_limit = 500
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set throttle_boost = 0
set p_pitch = 62
set i_pitch = 80
set d_pitch = 60
set p_roll = 58
set i_roll = 80
set d_roll = 58
set p_yaw = 75
set i_yaw = 70
set d_yaw = 3
rateprofile 0
set roll_expo = 25
set pitch_expo = 25
set yaw_expo = 5
set roll_srate = 77
set pitch_srate = 77
Теперь самое интересное - как летит MCHeliWhoop? Отвечу одним словом - божественно!!! Надо было видеть мой восторг после первого полета в штиль на улице! Нет, квадрик не прет как двухбаночный, больше подойдет определение как полуторабаночный:)
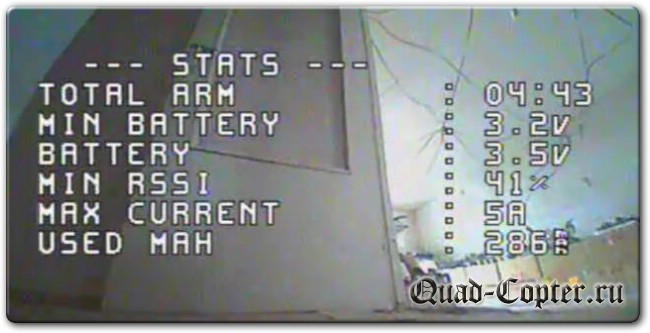
На полном газу напряжение на аккумуляторе проседает максимум до 3.4В, при обычном полете держится на 3.7В. После снятия нагрузки нет провала. Даже на подсевшем аккумуляторе динамика полета не меняется. Например, после петли не приходится вылавливать квадрик у земли, втапливая газ на полную. Он спокойно выходит из штопора и легко подхватывается.
Забыл вывести на OSD данные по току, но и без этого понятно, что модель не сильно напрягает аккумулятор. Квадрик прилетает абсолютно холодным! Висит на 40% газа, а при севшем аккумуляторе на 45%. Время полета в помещении более 4-х минут, дальше не проверял, пожалел аккумуляторы. На улице можно смело наваливать три минуты и больше. Надо внимательно следить за напряжением во время полета.
Поскольку нагрузка на аккумулятор небольшая, то напряжение после посадки будет не очень отличаться от того, что было на OSD. Если показывает 3.2-3.3В, то по факту будет 3.5-3.6В после отключения питания.
В помещении летать немого непривычно. Подхват по газу такой, что приходится очень аккуратно им работать. Зато управляемость ожидаемо на высоте! С таким весом квадрик мгновенно останавливается, нет никакой инерционности в управлении, вес аппарата вообще не ощущается, модель летит как пушинка. Крашеустойчивость в норме. С таким весом валы на моторах не погнуть, да и пропеллеры будет сломать проблематично:) Самым слабым местом оказалась канопа. В первый же день разломал ее. Переделал проект, усилил, где надо. Снова напечатал. Да, пластик надо менять. Заказал пробники флекса, нейлона и нейлона с карбоном. До этого пробовал печатать триммерной леской - сложный материал, надо всегда сушить перед работой и при печати сильно усаживается - не вариант.
На текущий момент, MCHeliWhoop будет моим основным тинивупом. Конечно же, буду еще пробовать различные комбинации моторов, рам и пропеллеров. Флюоресцентную раму еще не пробовал:) На подходе полетный контроллер BetaFPV F4 1S, а в дальнейшем, я уверен, появится аналогичный и на NFE Silverware. В общем, есть еще куда расти!
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...