Quanum Nova - это наиболее доступный из готовых квадрокоптеров которые могут носить стабилизирующий подвес с камерой типа GoPro.
Продается квадрик в разных вариантах, с аппаратурой управления, без нее, для него есть подвесы, подробно о комплектации и ссылки на продажу можно посмотреть тут.
Аналогом Новы является Cheerson CX-20, практически полный двойник, кроме надписей.
Инструкцию для этих квадрокоптеров можно прочитать тут, написана для Новы, но подходит и для CX-20.
Воздушные винты: Штатные 8х4.3, хорошо летает без камеры и подвеса. С подвесом или просто с камерой на авторежимах на этих винтах летает не стабильно.
Для полетов с подвесом: 9х4.5, 10х4.5 На последних летает дольше всего, винты надо укоротить на 2-3 мм, а то задевают друг за друга.
Трехлопастные 9х4.5 - хорошо работают с авторежимами, но очень резкий становится на ручном управлении.
Готов ответить на вопросы по этому квадрокоптеру.
Редактировалось: 1 раз (Последний: 2 июня 2015 в 22:15)
Никак не могу откалибровать Quanum Nova. 1) Вкл питание аккум . Мигает правый зеленый потом светиться ровно ( нашел спутники) стик газа в крайнее правое .... Правый красный мигает и сам квадрик мигает БАНО и пищит ... Все что бы не делал какие бы танцы не таневал ...не хочет винты запускать ..
1. вкл квадрокоптер 2. вкл аппаратуру управления 3. подожав секнд 20 левый стик вниз-вправо
Если не помогает - триммеры стика так же сместить вниз и вправо на 2 сек. Если задержать там на 20 сек - то перейдет в калибровку гироскопов.
Если не помогает - подключить к Mission Planer и убедившись, что передатчик коннектится с коптером, сделать калибровку стиков передатчика. Так же посмотреть - не слетели ли настройки арминга и на какое действие он настроен.
И вопрос - вы откалибровать или таки заармить пытаетесь?
Редактировалось: 1 раз (Последний: 9 декабря 2014 в 16:53)
Зармить ( Ну точнее запустить винты !! ) В ручном режиме !! Что значит (не слетели ли настройки арминга и на какое действие он настроен.) То есть действий может быть много ??!!
Пытаюсь запустить на окне ..спутники ловит на Mission Planer показывает 3х фиксацию.. Может на улицу выйти ?
Для арминга ловля спутников не нужна, посмотрите в мис.планере на калиброку аппы
Калибровка радиоуправления
Включите радиоаппаратуру, убедитесь, что передатчик находится в режиме самолета (APM необходим режим полета, независимо от типа платформы на экспериментальной основе), установите все стики по центру.
Рекомендуемая настройка RC каналов на передатчике. Для аппаратуры Mode 1 , левый джостик (стик) будет контролировать высоту (Pitch) и рыскания (Yaw), правый - будет контролировать дроссель (газ, throtle) и крен (Roll).
Для аппаратуры Mode 2 , левый джойстик (стик) будет управлять дроссельной заслонкой (throtle) и рыскания (Yaw); правый - будет контролировать крена (Roll) и тангажа.
Для любого типа передатчика, трехпозиционный переключатель должен быть подключен к 5-му каналу и будет контролировать режимы полета.
По желанию ручки настройки передатчика должны контролировать канал 6 для настройки полетета. 7 и 8 канал могут быть использованы для вспомогательных функций. В Planner Mission, нажмите кнопку "Калибровка Радио" в нижней правой части окна. Mission Planner вызовет диалоговое окно с предупреждением что пропеллеры должны быть сняты!. Выберите OK.
Нажмите OK и начните двигать ручки управления и тумблерами на аппаратуре до их предела и наблюдайте за результатом калибровочных границ радио. Появившиеся красные линии калибровочных баров укажут максимальное и минимальное значения.
Ваше передатчик должен привести следующие изменения управления:
радиоканал 1: низкий = ролл слева, высокий = ролл прямо радиоканал 2: низкий = шаг вперед, высокая = шаг назад. радиоканал 3: низкий = дроссельная заслонка вниз (в выключенном состоянии), высокий = дроссельной заслонки до максимума. радиоканал 4: низкий = рыскания влево, высокий = рыскания вправо.
Когда красные линии для крена, тангажа, дросселя, рыскания и радиоканала 5 (необязательно у радиоканалов 6, 7 и 8) установлены на минимальных и максимальных значениях, выберите нажмите "Done". Mission Planner покажет сводку данных калибровки. Нормальные значения около 1100 для минимумов и 1900 для максимумов. Если значения показания бара идут в противоположном направлении от направления движения стика или тумблера это означает, что канал находится в инверсии на стороне передатчика. Используя меню аппаратуры настройте требуемый канал (установите или снимите инверсию) что бы установить правильное функционирование.
Если аппа откалибрована, а снятие не происходит то вероятно:
APM с прошивкой 3.0.1 (и выше) включает в себя предварительную проверку безопасности при снятии с охраны, которая приводит к тому, что одна из проблем была выявленна:
Проверяет, что была выполнена калибровка Радио. Проверяет, что была выполнена калибровка акселерометра. Проверяет, что компас здоровый и правильно передает данные. Проверяет, что смещение компасе не слишком большое (т.е. корень SQRT (х ^ 2 + у ^ 2 + Z ^ 2) <500). Проверяет, что калибровка на живую компаса или на базе журналирования была выполнена или что "COMPASS_LEARN" включен. Проверяет адекватное напряжение магнитного поля: (APM1/APM2 около 330, PX4/Pixhawk около 530) Проверяет, что барометр здоровый и правильно обменивается данными. Если круговая ограда (Fence) включена или снимаете с охраны в режиме Loiter проверка безопасности проверяет, что: у вас есть фиксация спутников по GPS параметр GPS HDOP < 2.0 (настраивается параметр GPS_HDOP_GOOD) Путевая скорость меньше 50 см / сек Проверяет, что полетный контроллер питается между 4,5 и 5,5 вольт для АРМ 1 или АРМ 2 Проверяет, что 7 и 8 канал не настроен на управление на одну и ту же функцию. Если включен Radio FailSafe проверяет минимальное значение стика газа канала не ниже FS_THR_VALUE Проверяет параметр ANGLE_MAX (т.е. максимальный угол наклонав большинстве режимов) является больше 10 и меньше 80 градусов Проверяет уровень PWM по четырем первым каналам , если они меньше 1300 и не больше 1700 Если все остальное нормально, за исключением того, когда вы пытаетесь снять с охраны (Arming) стиком газа вниз и вправо (режим Mode2 на аппаратуре), он будет на самом деле не сниматься с охраны и двигатели не будут вращаться он, вероятно, не прошел проверку Pre-Arm безопасности. Вы должны заметить, что красный светодиод будет мигать двумя быстрыми вспышками по кругу.
Вот видео где все это описывается:
Вариант - настроить все как полагается или отключить проверки.
Чтобы понять, что вызвало сбой Pre-Arm Check:
Подключите свой полетный контроллер к компьютеру через порт USB. Запустите Mission Planner и соединитесь с ArduPilot нажав кнопку "Connect" в правом верхнем углу. Включите аппаратуру радиопередатчика и удерживайте стик газа вниз и вправо (процедура постановки на охрану - Disarm). Первый причиной проверки отказа Pre-Arm безопасности будет отображаться красным цветом в окне HUD Mission Planner. Каждая проблема и адрес будет сообщаться при попытке снять с охраны, как указано выше. Когда все проблемы были исправлены, вы увидите проверку "снятия с охраны" (Pre-Arm Check) в окне HUD. После этого можно отключить от компьютера и имеють хорошую гарантию того, что снятие с охраны (arming) будет происходить в обычном режиме. Устранение проблем предварительной проверки снятия с охраны (Pre-arm fix):
Если не прошла проверка Радио калибровки - сделайте повторно калибровку радио . Если не прошла проверка калибровки акселерометра - сделайте повторно калибровку акселерометра . Если происходит сбой компаса - сделайте заново живую калибровку компаса . Если проверка барометра (высотомера) не работает, то ваш контроллер скорее всего имеет аппаратную проблему с барометром. Если проверка позиция GPS не удалась ждать HDOP вашего GPS, чтобы он опустился ниже 2.0, прежде чем пытаться снимать с охраны. Вы можете сделать это более легко - наблюдая в области быстрого экрана Mission Planner.
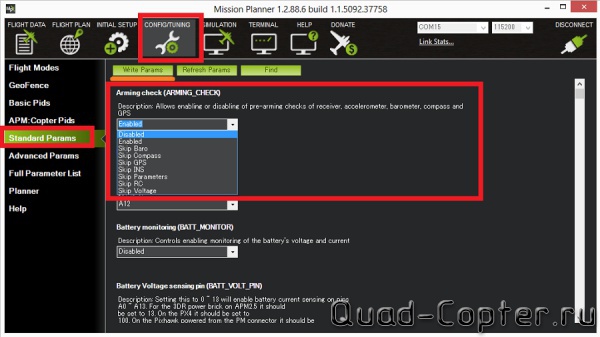
Отключите Geofence в Config/Тюнинг -> Geofence Снимите с охраны (arming) в полетный режим Стабилизации (Stabilize mode) и позже перейдите в режим Loiter (этот режим (loiter) не рекомендуется на момент старта, потому что хорошая фиксация по спутникам GPS требуется для Loiter и HDOP является хорошим показателем того, что GPS позиция хороша) увеличить параметр GPS_HDOP_GOOD от 200 до 250 (это также не рекомендуется по тем же причинам, что и выше) Если проверка напряжения питания полетного контроллера не успешная: проверить UBEC , который используется для подачи напряжения на АРМ напряжение должно быть между 4,5 и 5,5 вольт (чем ближе к 5V, тем лучше) проверить, если какие-либо периферийные устройства, которые питаются от АРМ и имеют слишком высокий потребляемый ток. Если на канал 7 и 8 было установлено тоже самое (одинаковая функция) измените один из них с помощью Mission Planner Config/Тюнинг -> PIDS
Редактировалось: 2 раза (Последний: 10 декабря 2014 в 00:05)
Добавлено спустя 10 минутНу вот так ...мигает левый сигнализатор правый зеленый нашел спутники .. При подключении к APM все нормально видит авиагоризонт соображает где верх где низ и ореентируется по компасу.. Батарея в норме ...че ем нужно ???? Хоть бы винтами помахал бы...а то получеться красивая Новогодняяя мигалка !!! Гыгыгыгыг...
А еще одину нашел бачек так сказать .внешний USB стал не контачить нужно пропаять ...внутри на блоке там микро USB шлейф выведен и распаян на плату ,на плате стоит МИНИ USB ... Да еще наблюдения два канала регулировки ( Крутилки на Апппаратуре управления ) Снизу есть вышоды на серво приводы ( IBV cbuyfk ) ..работает все отлично при подключении внешней сервомашинки ( Включал упарвление колесами RC машиной ) Хотя в настройках программы APM действие этих регуляторов не отображается...
Ну все пошел поропаивать разъем USB ..по надежнее. И Следовать советам...
Я бы попробовал все возможные комбинации стиков: Вниз влево, вниз вправо, сначала по очереди, потом совместно Оба вниз к центру, оба вниз в разные стороны.
Хотя по видео - у вас проблемы с настройками безопасности "Если все остальное нормально, за исключением того, когда вы пытаетесь снять с охраны (Arming) стиком газа вниз и вправо (режим Mode2 на аппаратуре), он будет на самом деле не сниматься с охраны и двигатели не будут вращаться он, вероятно, не прошел проверку Pre-Arm безопасности. Вы должны заметить, что красный светодиод будет мигать двумя быстрыми вспышками по кругу." А в этом случае квадрик просто блокирует арминг, что бы потом не писали "квадра улетела в китай..."
Решаем пока техническую проблемку ..(хреново спаяно на соплях ) Между блоком, там micoUSB и платой на которой выполненны разъемы двух каналов AUX и +12 и miniUSB нет контакта щас буду перепаивать новый шлейф. Пришлось разобрать и к "мозгам" подключаться через micoUSB .
Ну Выдает PreArm - нет фиксации 3D ( Ну оно и понятно я в мастерской гараже )
Сорь, я так глубоко в ардуринку не залазил... А арминг в настройках на что установлен? По картинкам я понимаю - квадра в данном случае не видит попытку заармиться.
На вых могу подключить свой квадр и заскриншотить настройки.
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...