Здравствуйте, уважаемые читатели! В этой статье рассмотрим FPV вупчик Tinyhawk на БК моторах от известного Китайского бренда EMAX. Неравнодушных к теме FPV полетов, прошу под кат.
Упаковка и комплектация
Поставляется квадрокоптер в очень оригинальной упаковке, небольшом кейсе из кордуры, на котором выдавлен логотип компании EMAX.
Внутри кейса мы найдем сам квадрокоптер, инструкция, USB зарядное устройство, аккумулятор и дополнительные принадлежности в виде крохотной крестовой отвертки.
Инструкция
Один 1S HV (4.35 В) аккумулятор емкостью 450 mAh и токоотдачей 80C. Данный аккумулятор обеспечивает среднее время полета в районе 3 минут в зависимости от того, как вы будете работать газом.
6-ти портовое зарядное устройство с возможностью выбора зарядного тока 0.2A/ 0.6A. В качестве питания для зарядника предполагается использование USB БП от смартфона, рассчитанного на токи не ниже 2A.
Описание и характеристики
Микрокоптер Tinyhawk как нельзя лучше подходит полетов и тренировок в достаточно просторных помещениях. На таком микролете можно летать и на улице, на небольшой площадке в сухую безветренную погоду. Основные достоинства – бесколлекторные моторы, F4 полетник с интегрированным Frsky приемником и регуляторами, очень небольшой полетный вес.
Рама модели выполнена из белого ABS пластика, при этом она довольно жесткая на изгиб. Сломать такую раму можно разве что случайно наступив на нее. В контексте данного микрокоптера, рама просто не убиваемая. Хотя, если поломка случится, новая рама стоит 10$.
FPV глазами пилота квадрокоптера является миниатюрная камера, совмещенная с видеопередатчиком работающем на частоте 5,8 ГГц.
Камера зафиксирована жестко – изменять вертикальный угол продольной оси камеры нельзя.
Соотношение сторон — 4:3;
Поле зрения — 150 °;
Тип матрицы — CMOS;
Видеостандарт — NTSC;
Горизонтальное разрешение матрицы — 600TVL;
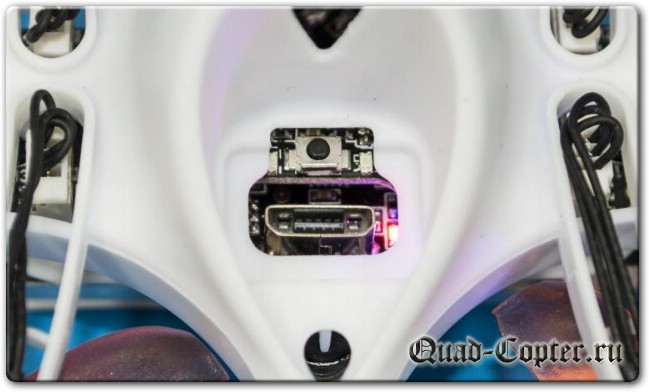
Подключить плату к компьютеру для настройки полетного контроллера в программе Betaflight можно через распаянный на ней USB – разъем, который расположен не очень удачным образом, да и отломить его от платы при неаккуратном подключении очень легко.
Рядом с USB – кнопка, переключающая каналы видеопередатчика, рядом расположены два светодиода по световой индикации которых можно определить частоту, на которой сейчас работает передатчик.
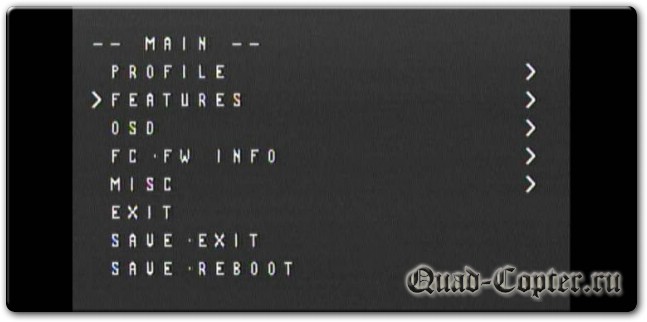
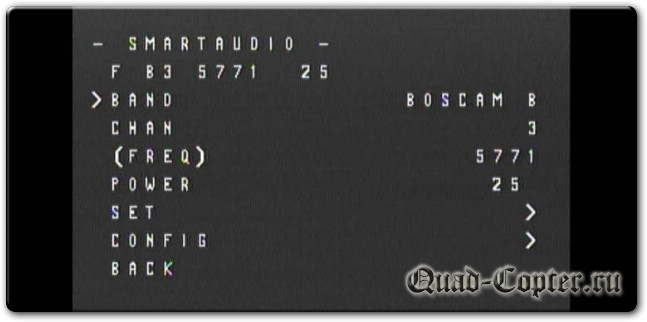
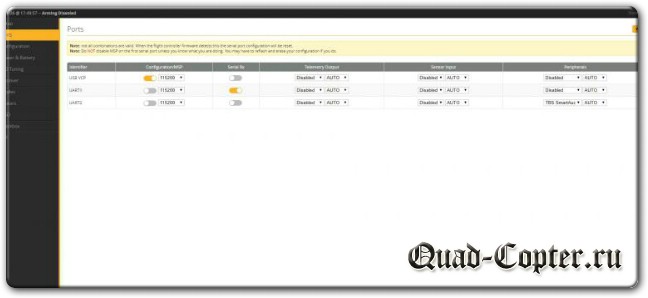
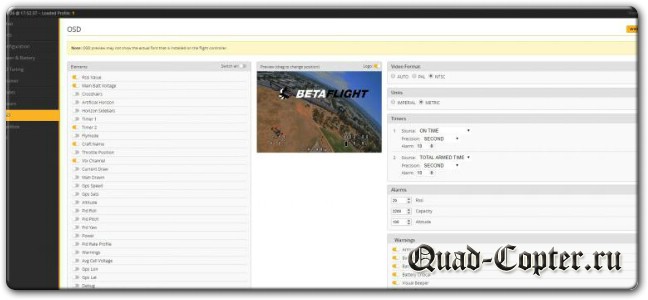
Несколько слов скажу про реализованное в Tinyhawk удаленное управление параметрами видеопередатчика через порт UART 2 и меню Betaflight. Для входа в меню необходимо дизармить коптер, установить стик газа в положение 50%, стик PITCH вверх (UP), YAW LEFT и мы попадаем в экранное меню Betaflight. Переходим во вкладку FEATURES далее во вкладку UTX SA, где можем менять частотную сетку и канал. После изменения настроек необходимо войти в пункт SET и подтвердить изменения YES.
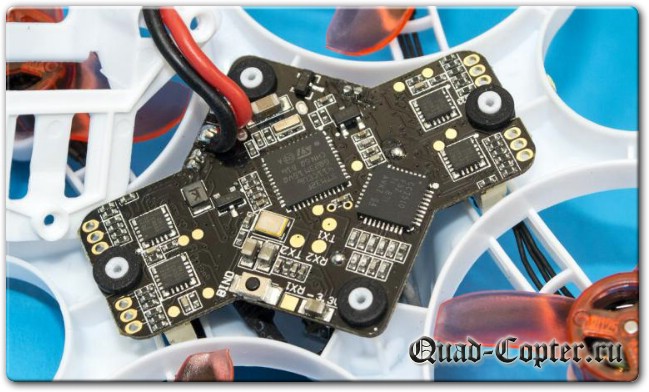
На квадрокоптере применены бесколлекторные электромоторы 08025, 15000 Об/В. Два мотора левого вращения, два правого. Для их быстрой замены предусмотрены разъемные соединения моторов с основной платой полетного контроллера. Пропеллеры, толкающие 3-х лопастные, диаметром 40 мм.
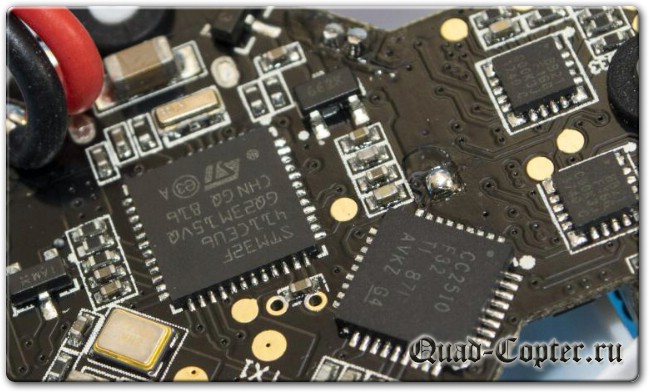
На основной плате микрокоптера интегрирован полноценный контроллер F4 (STM32F4), в качестве сенсора использован чип MPU-6050. А также на плате интегрированы четыре регулятора оборотов с поддержкой протокола dshot 600 (ток до 3А) и приемник для аппаратур фирмы FrSky, работающий в режиме D8. Подключить плату к компьютеру для настройки полетного контроллера в программе Betaflight можно через распаянный на ней USB – разъем.
Настройка
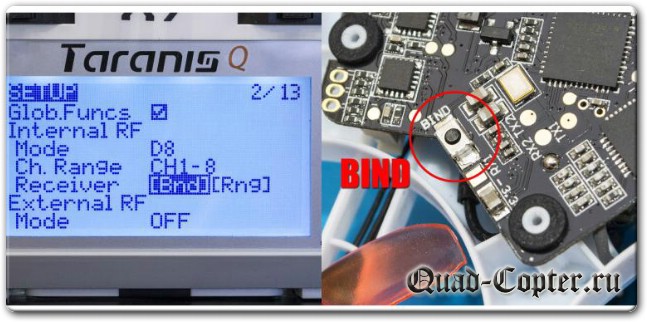
Прежде чем настраивать полетный контроллер нам необходимо подружить приемник коптера с вашим передатчиком. Выполнить – BIND. Для этого включаем ваш таранис (или используемую вами аппаратуру с модулем Frsky). Входим в меню настройки модели. Переходим на страницу 2. В строке MODE выбираем тип приемника D8 и активируем параметр «Bnd». На плате полетника зажимаем кнопку BIND и, не отпуская кнопку, подключаем аккумулятор к модели. После этой процедуры приемник коптера будет настроен именно на ваш передатчик.
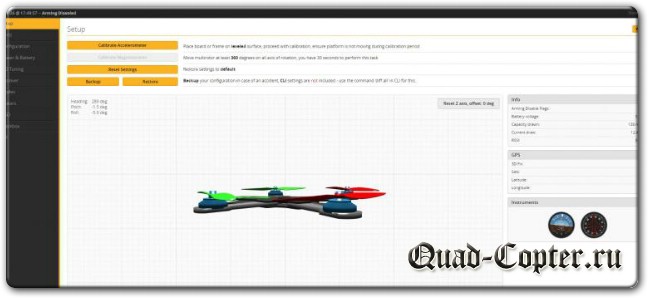
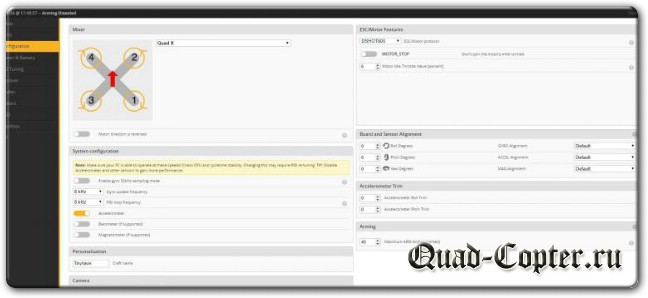
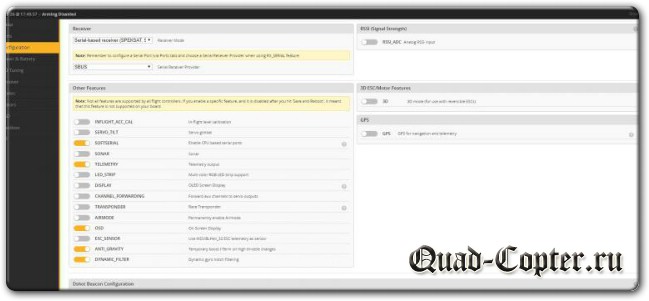
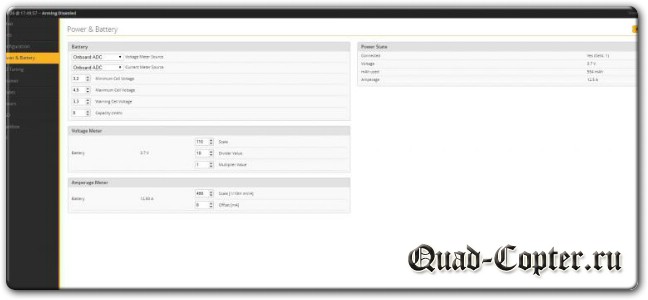
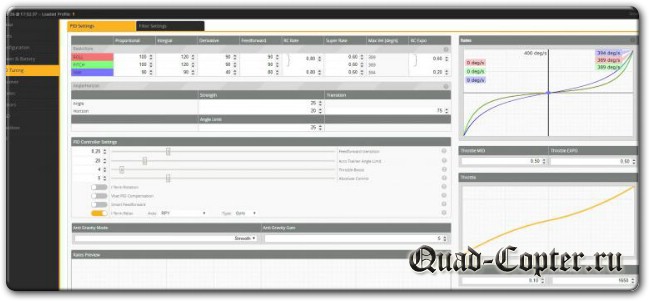
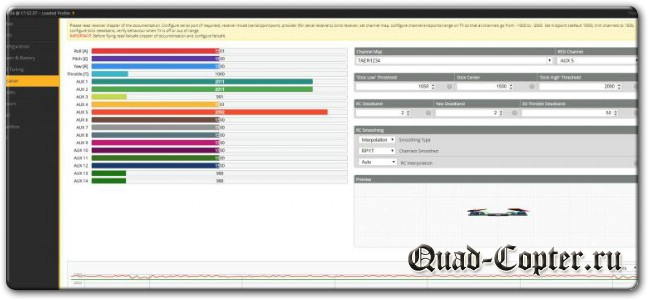
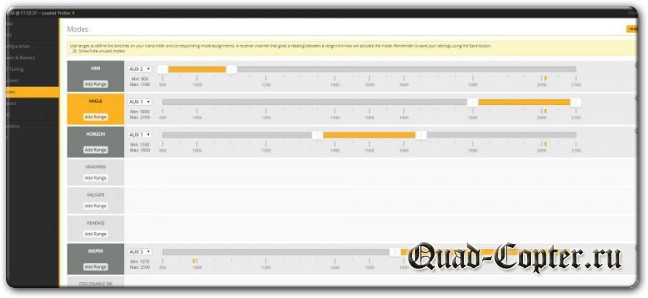
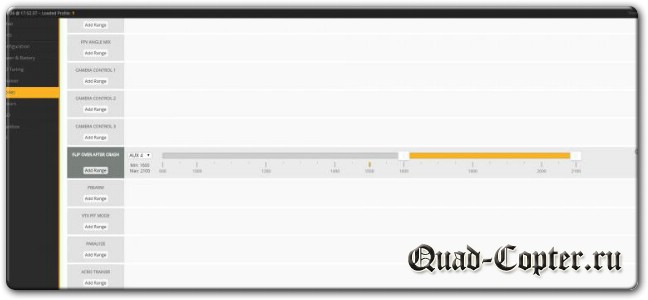
На полетный контроллер была уже установлена прошивка betaflight_3.5.1 (таргет MK41), которая уже оптимально сконфигурирована для данной модели, настройки PID регулятора лучше оставить по умолчанию. Остается только настроить вашу аппаратуру, полетные режимы, немного подкорректировать «Rate» и экспоненты «по вкусу». Можно добавить расходов и уменьшить экспоненту в зависимости от навыков пилотирования, так как в стоке они зажаты. Модель летит как по рельсам, при условии полного штиля, если вы вздумаете полетать на открытом воздухе. Настройки Betaflight убрал под спойлер.
Настройки в Betaflight
Полетал по квартире, на улице лютый мороз и аккумулятор вымораживается мгновенно:
Отзывы на EMAX Tinyhawk
В отличие от коллекторных собратьев Tinyhawk летит отлично, управляется как по «рельсам», радует, что мозгом квадрика является полноценный контроллер F4, с ним всегда найдется место для творчества.
Полет ровный, не дерганный, без рысканий в стороны и плавания по высоте (чем особенно грешат коллекторные). Повороты отрабатывает четко, без бокового скольжения. В стабе горизонт держит отлично, в ACRO управляется очень плавно, БК моторы есть БК моторы – разница с коллекторными чествуется сразу. Квадрик летит сразу из коробки без танцев с бубном и каких-либо настроек PID регулятора, воткнул акум и вперед – немаловажно для FPV новичков.
В целом квадрик неплохой, никаких больших критичных «косяков» или явных конструктивных недостатков я не обнаружил, если душа лежит к тини вупам – Tinyhawk вполне достоин приобретения.
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...