Привет всем! Хочу поделиться первыми результатами.
RTH(return to home) еще не проверял так как новый коптер еще не готов (собираю на раме tarot TL250c (robocat))
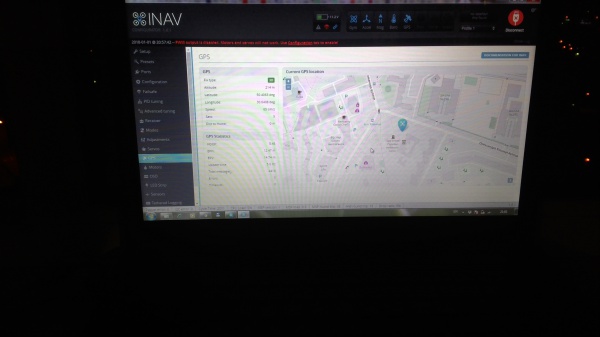
Но само позиционирование GPS уже работает.
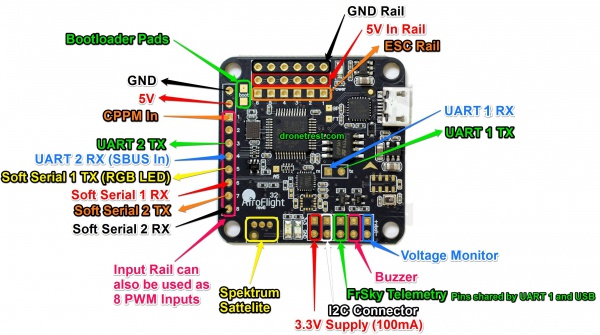
Брал Naze 32 Full rev.6 и заливал прошивку INAV 1.7.1 (кстати на cleanflight 1.20 тоже работает)
Планирую использовать MinimOSD для этого нужны два прота UART (один для GPS, второй для OSD)
Из-за особенностей самого Naze 32 придется покупать приемник с CPPM сигналом.
Т.К. я использую ВЧ модуль DJT то по приемникам есть два варианта:
1) FrSky D8R-XP но их мало
https://www.aliexpress.com/item/FrSky-2-4G-8CH-D8R-XP-D8RXP-Telemetry-Receiver-Compatible-with-FrSky-DFT-DJT-DHT-DHT/32834396079.html 31.59$
2) FrSky D8R-II
https://www.aliexpress.com/item/FrSky-Two-way-2-4G-8-Channel-Receiver-D8R-II-Plus/1562144186.html Приблизительно за те же деньги, но его нужно перепрошить прошивкой FrSky D8R-XP, например так:
http://www.funuav.com/2012/11/frsky-d8r-ii-plus-firmware-upgrade-to.html Теперь о самом модуле GPS:
Сначала купил вот такой модуль NZ GPS for NAZE32 :
https://www.aliexpress.com/item/NZ-GPS-for-NAZE32-Flip32-6dof-10dof-best-for-QAV250-ZMR250/32502565866.html Не буду долго рассказывать о моих мучениях, но вопреки утверждениям создателей INAV он РАБОТАЕТ!
Этот GPS не хранит долго настройки (пару часов или максимум день из-за батарейки на плате самого датчика) его не нужно настраивать.
Нужно что бы в INAV был включен автоконфиг. (проверяем в CLI командой get gps_auto_config - должно быть gps_auto_config= ON, если нет, то пишем set gps_auto_config= ON и потом проверяем.)
ничего не нужно делать из того что написано тут в GitHub по INAV
https://github.com/iNavFlight/inav/wiki/GPS--and-Compass-setup Но проблемма в том, что не вдаваясь в подробности, этот датчик очень долго ловит спутники. Первый запуск после пары часов без питания может занят 30-50 минут.
Стоимость этого датчика 14$
Вот этот датчик ловит 6 спутников за 2 мин. и Naze 32 переходит в режим safe navigation, и пишет 5или6 3DFix! Очень быстро все хватает.
Ublox M8N GPS
https://www.aliexpress.com/item/New-8M-Ublox-M8N-GPS-Module-For-APM-Pixhawk-CC3D-Naze32-F3-Flight-Control-For-RC/32823502203.html Цена 21$ но купил со скидкой за 12$ )))
И опять таки: НЕ НУЖНО НИЧЕГО НАСТРАИВАТЬ! Толко автоконфиг и активировать порт и саму функцию GPS.
Повторюсь : использовал прошивку INAV 1.7.1
Есть еще один ньюанс:
Если хоть что-то включено в порт UART1 на NAZE32 при подключении его к компьютеру освобождайте этот порт, USB и UART1 в NAZE32 связаны, по этому GPS лучьше включать в UART2.
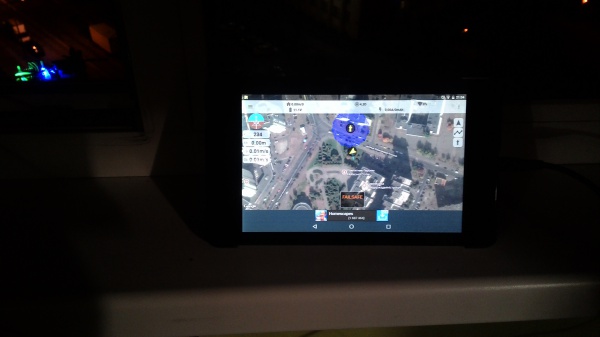
Еще работает планировщик миссий на Android и даже загружает миссии (полет по точкам GPS) в NAZE32
Программы называются EZ-GUI Ground Station и Mission Planner for INAV. Подключаем через OTG кабель)
Как коптер возвращается по RTH или FailSafe с посадкой в место взлета, пока не проверял. Проход по точкам пока тоже не проверял, коптер еще не готов.
P.S. Вот фотки:
Добавлено спустя 6 минут