Хороший подарок чтобы понять: «А нужны ли мне(или ребенку) вообще „квадрики“?..
Самый дешевый на момент покупки(да и сейчас тоже) мини квадрокоптер с 5-ти сенсорной системой избегания врезания в препятствия и барометром.
Небольшая(надеюсь) предыстория
Как то в один погожий денек, начитавшись обзоров квадрокоптеров на муське, я решил, что мне нужен квадрокоптер! Не знаю зачем, но не могут же столько людей в комментариях так радостно и порой так яростно восхищаться этими летательными аппаратами! Тут же была придумана отмазка-оправдание: буду играть вместе с ребенком!
{ads}
Многие советовали как первую модель простейший JJRC H36 или его аналоги: стабильный, с защитой лопастей, дешевый… Нашел самый дешевый на али с 3-мя аккумуляторами ссылка, купил, получил…
Но на нем же без многонедельного обучения не то что летать, даже неподвижно висеть в воздухе невозможно!!! Разрядив в полете с десяток аккумуляторов, протаранив множество раз все стены-потолки-полы-люстры-шкафы-шторы-окна, я понял, что асом мне быстро не стать, а долго учиться управлять я не хочу, мне бы сразу поиграться… В общем ребенку даже не показывал, продал по дешевке.
Уже позже я узнал что у данной модели квадрокоптера слишком резкие стики, что их нужно удлинять, а я вообще вначале подумал что мне попался брак, ибо левый стик не был подпружинен!
В общем, еще пару часов изучения обзоров, чтения рекомендаций на форумах, и я пришел к выводу, что мне нужен квадрокоптер с функцией удержания высоты посредством встроенного барометра.
А далее мне попалась ссылка на рекламное видео героя данного обзора, так называемое „видео с пандой“
Существует несколько „разновидностей“ данной модели(а конкретно 3), практически не отличающихся внешне и по функционалу: TAAIW-T2G, HELIFAR H803, JJRC H56 TaiChi.
Главным критерием где покупать стала цена (15,99$ c одним аккумулятором), при необходимости можно докупить аккумулятор на али ссылка 2,28$ /штука.
А теперь, прежде чем перейти непосредственно к обзору, хочу тезисно и по-возможности аргументированно, объяснить некоторую, может быть излишнюю, категоричность заголовка.
В комментариях к обзорам квадрокоптеров очень многие опытные „повелители дронов“ часто делят всех будущих покупателей на две категории:
1)первый недорогой квадрокоптер покупается для обучения пилотажу, чтобы с наименьшими финансовыми потерями потом постепенно перейти на дорогие и качественные дроны, поэтому якобы для этого у первого аппарата не должно быть никаких дополнительных систем стабилизации.
— По-моему наиболее качественной и соответственно дорогой является продукция фирмы DJI… Но ведь их квадрокоптеры просто напичканы всевозможными системами стабилизации(GPS, ультразвук, оптическая съемка карты местности, сонары, лидары, вбитые в память запретные зоны… чего там только нет!). В этом случае достаточно просто подробно изучить оборудование и инструкцию, совершить пару пробных полетов на открытой местности и… все, дроны очень стабильны. Насколько я знаю, они даже флипы не умеют(не позволяют) делать!
2)первый недорогой квадрокоптер покупается для обучения пилотажу, чтобы потом перейти на гоночные квадрокоптеры с FPV(полеты от первого лица, в шлеме/очках, не по WiFi), чтобы потом участвовать в соревнованиях или „рассекать“ по квартире кругами, пролетая между ножек табуретки(видел такое в нескольких обзорах)…
— Ну тогда наверное нужно сразу покупать квадрокоптер с аналоговой камерой или с возможностью установки оной…
А ведь существует и третья категория покупателей(все остальные, я обобщаю):
— люди, которые хотят понять, что это вообще такое, и надо ли оно им;
— мамы/бабушки/дедушки, покупающие любимым детям/внукам новую игрушку;
— отцы/дяди, которые хотят перед вручением подарка сами сразу насладиться полетом…
То есть чтобы бегло глянув инструкцию или „видосик“, вставив аккумулятор и включив квадрик, можно было сразу, даже без управления пультом(а обозреваемая модель позволяет вообще без пульта управлять дроном) попарить в воздухе; с пультом не врезаясь сразу в потолок или любимую вазу, вальяжно облететь всю комнату, сделать несколько флипов, при этом не нужно судорожно впиваться пальцами в джойстики, совершая одновременно три действия двумя руками, чтобы только удержаться в воздухе!!!
А если обычному ребенку сразу вручить квадрик хотя бы без функции удержания высоты, то после десятка неизбежных падений в первые же минуты, разлетания винтов по квартире/траве, он запросто может сам руками запустить его об стену со злости! Да я сам чуть не запустил свой первый квадрик об стену(см. предисловие)!
Итак, собственно обзор, первый текстовый русскоязычный данной модели квадрокоптера, где я возможно примитивно покажу как работает удержание высоты барометром, стабилизация гироскопом, измерю длительность полета, точное время зарядки и токи, попробую измерить грузоподъемность и дальность действия пульта, покатаю пассажира, покажу макрофотографии датчиков… Поехали!..
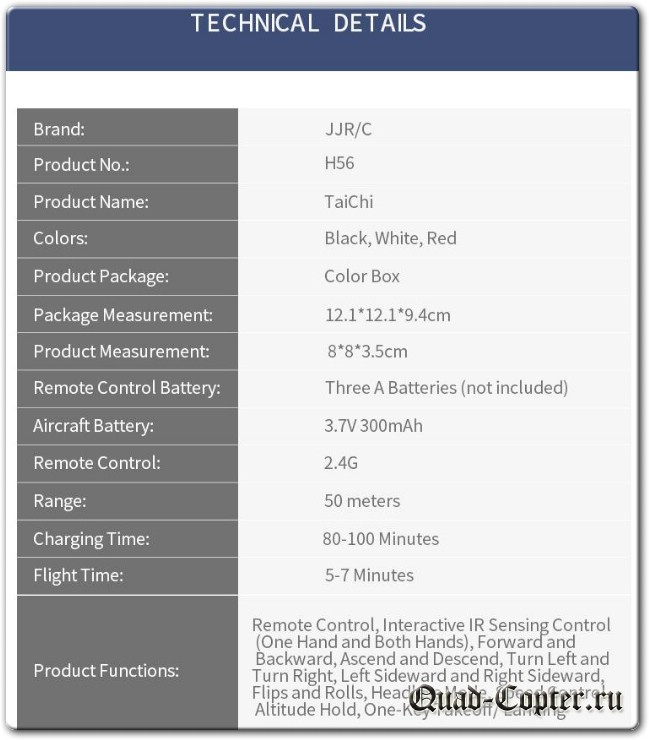
Характеристики с официального сайта:
Приходит квадрокоптер в простом почтовом пакете без воздушных пузырьков, а поскольку по форме посылка отдаленно напоминает мяч, этим не преминула воспользоваться почта, немножко поиграв в футбол:
Содержимое коробки причем при этом не пострадало. Квадрокоптер и пульт находятся в стоящих друг на друге пластиковых блистерах, квадрик при этом еще дополнительно прикручен проволочкой к блистеру. Все остальное содержимое находилось в выемке:
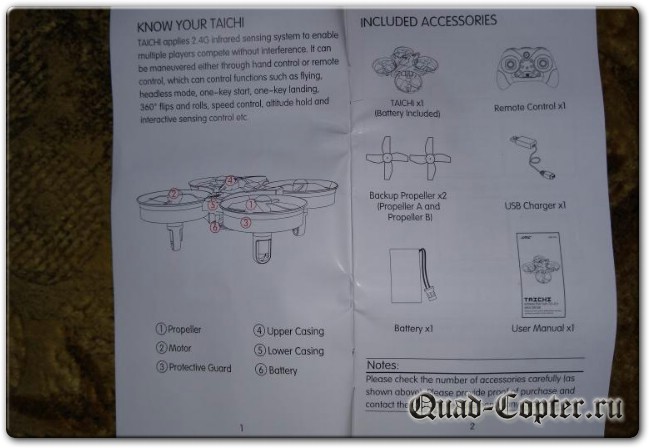
Комплект:
— квадрокоптер
— пульт без батареек(нужны 3 штуки ААА)
— аккумулятор
— зарядка с USB
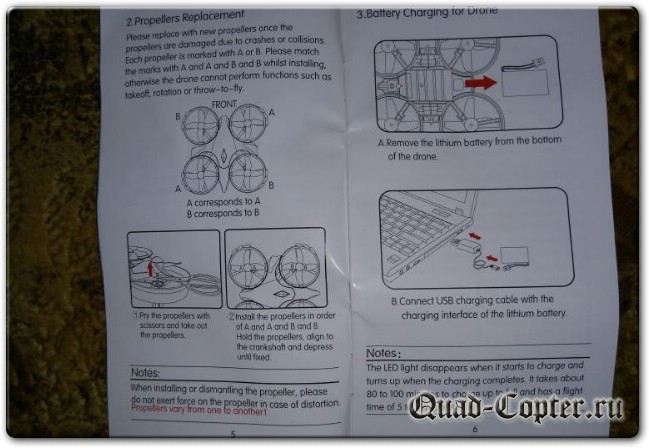
— запасные воздушные винты(пропеллеры),2 левых и 2 правых(вы же знаете что они разные?)
— отвертка
— макулатура.
Сам квадрокоптер, вид сверху:
Вид анфас:
Вид снизу:
Сразу вес с аккумулятором — 28 граммов:
Пульт. Внешне сделан поаккуратнее чем пульт от модели JJRC H36, чуть посерьезней:
Выступ стиков(или манипуляторов, джойстиков) над корпусом:
Вес с тремя щелочными ААА батарейками — 99 граммов:
Родной аккумулятор на 300 мАч, 15с, то есть способен отдавать токи в 15*0,3А=4,5 Ампера:
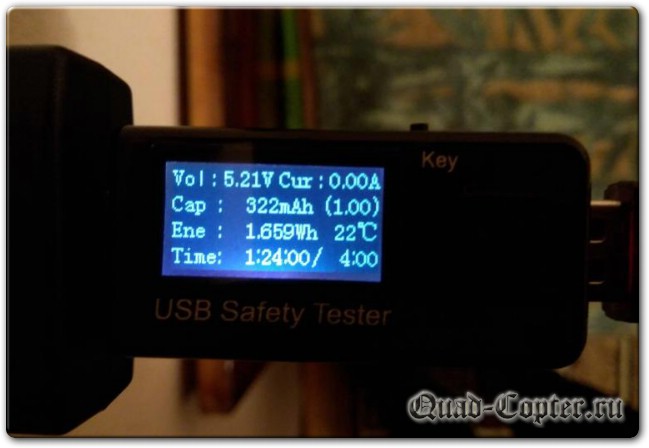
Проверка залитой емкости и времени зарядки:
От блока питания с напряжением 5,2В зарядка стартует током 0,37А(меньше минуты, затем 0,31А):
Через 77 минут залилось 336 мАч:
При окончании зарядки загорается красный светодиод.
Кстати, много где встречал в обзорах совет немедленно отключать аккумулятор… Но зачем?! Насколько я понимаю(разобрать аккуратно не смог) внутри комплектной так называемой зарядки находится всего лишь токоограничивающий резистор, а сам процесс зарядки прекращается, когда срабатывает встроенная защита самого аккумулятора, то есть аккумулятор уже перезаряжен, и несколько часов в подключенном к зарядке состоянии после прекращения заряда ему не повредят…
После нескольких циклов доставания аккумулятора из квадрика для зарядки, мне это надоело, и я стал заряжать аккумулятор прямо в нем, используя качественный недлинный удлинитель USB. При этом время зарядки увеличилось до 84 минут:
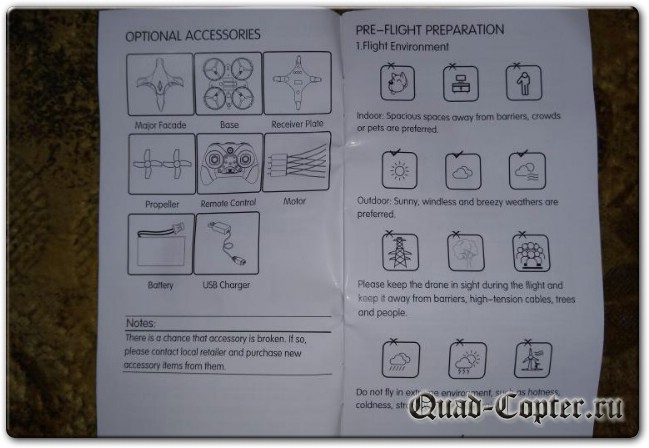
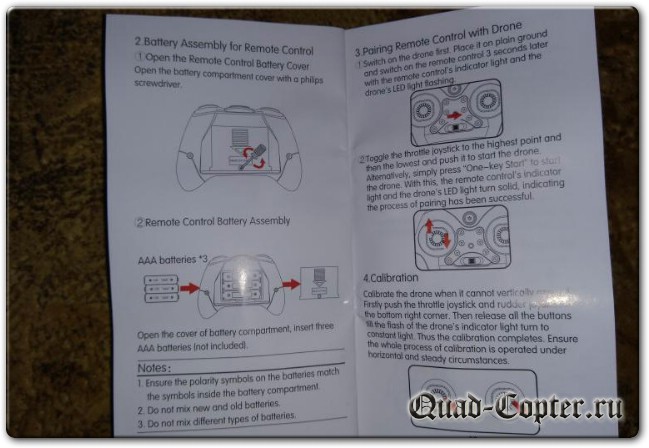
Если использовать зарядное устройство с выходным напряжением 5В, время зарядки увеличивается до 100 минут, как и упомянуто в инструкции… Кстати о ней:
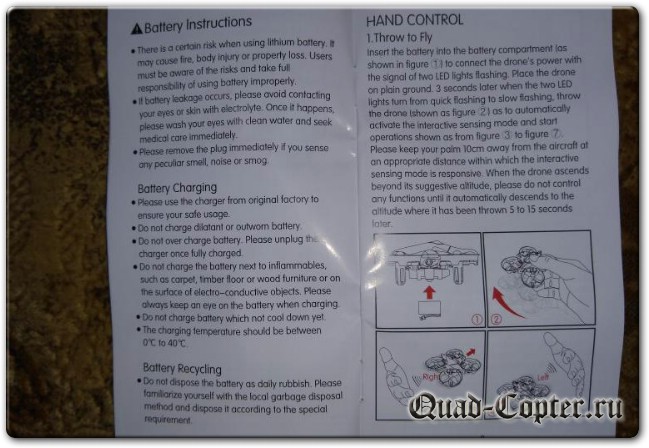
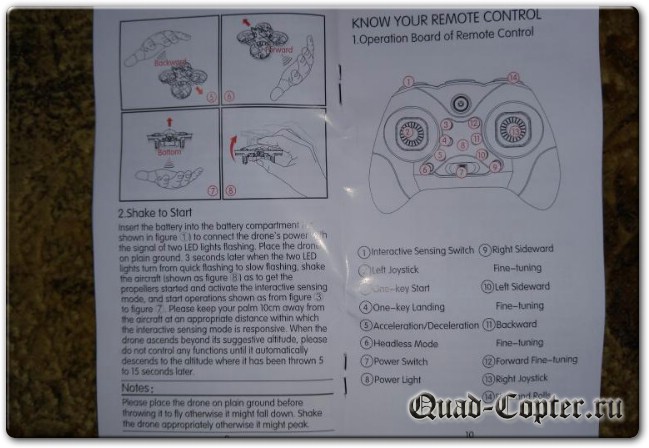
Написана на нормальном английском языке, картинки понятные(спрячу под спойлер):
Инструкция:фото
Нашел инструкцию в виде pdf файла, может кому-нибудь нужна: ссылка
Вторая бумажка это инструкция для айфонов как проводить (?)воздушные бои:
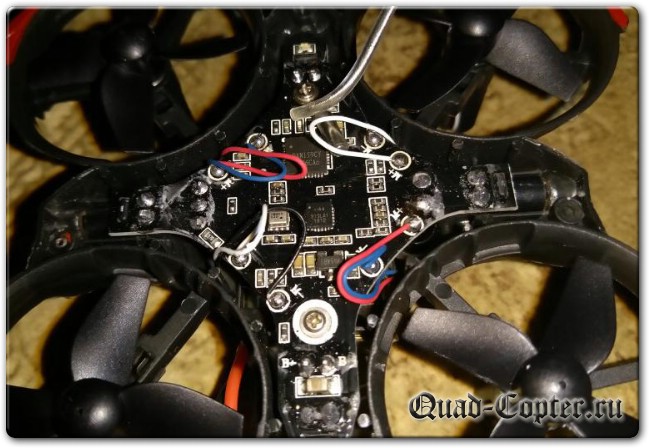
Доступ к печатной плате открывается после откручивания 2-х винтов:
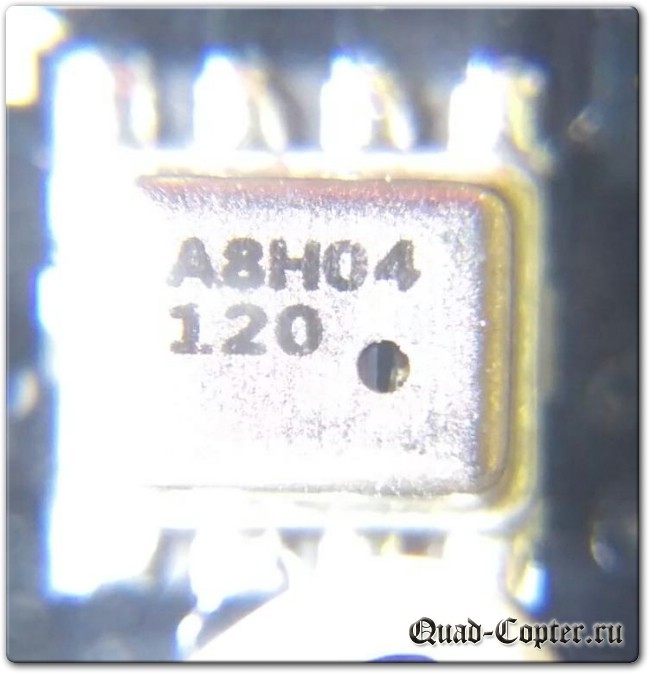
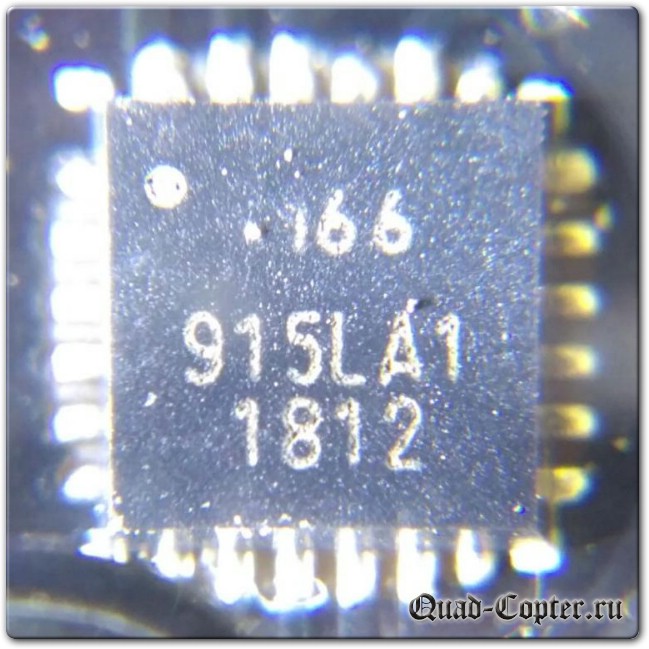
Далее макрофотографии датчиков и управляющей микросхемы, datasheet не нашел, наверное китайские копии чего-нибудь известного:
— барометр, видно отверстие с (?)мембраной:
— 3-х осевой гироскоп, совмещенный с 3-х осевым акселерометром:
— управляющий процессор:
По поводу органов управления пульта и режимов:
Все стандартно для подобных мелколетов:
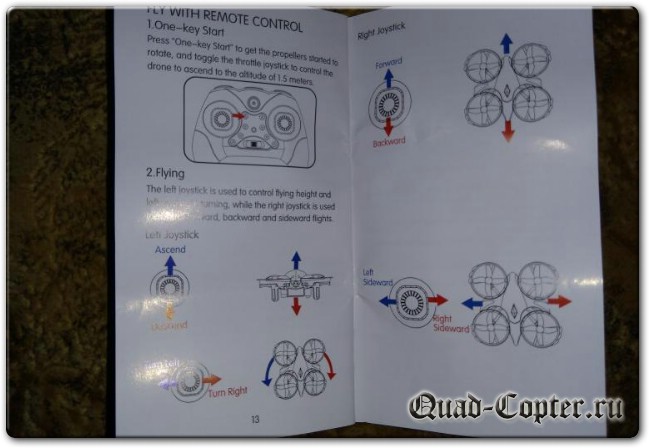
— левый джойстик: набор высоты/снижение с ее(высоты) поддержанием после отпускания джойстика; вращение влево/вправо;
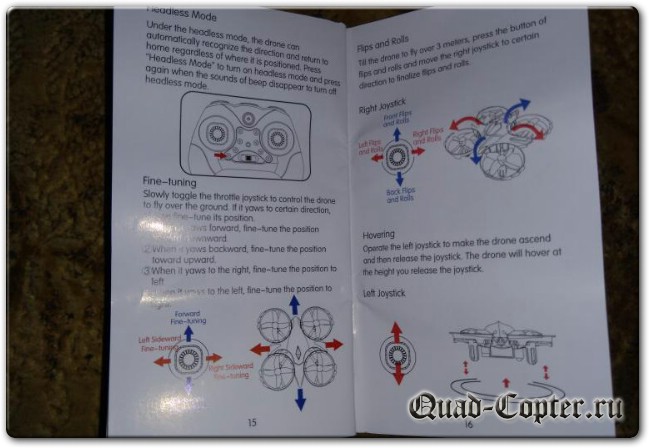
— правый джойстик: полет вперед/назад; влево/вправо; флипы в выбранном направлении после предварительного нажатия правой кнопки на торце пульта;
— 4 кнопки возле правого джойстика: триммирование(компенсация) самопроизвольного движения квадрокоптера после взлета по 4-м направлениям(редко требуется);
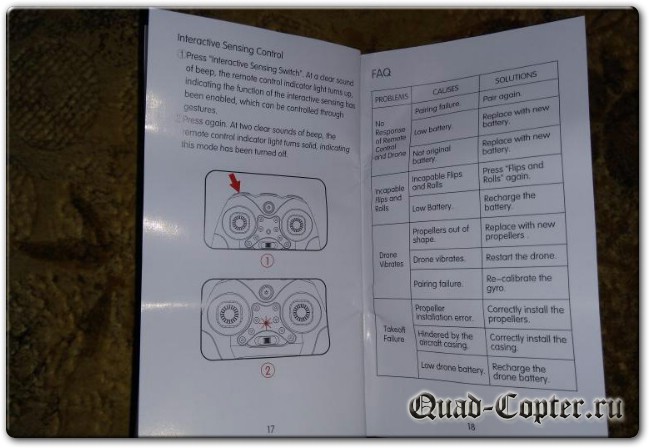
— левая кнопка на торце: долгое нажатие включает режим полета с сенсорами препятствий, при этом на пульте постоянно мигает светодиод;
— две кнопки правее левого джойстика: автоматический взлет(на высоту примерно 1 метр) и автоматическая посадка(при опускании на ковер может нестолько раз подпрыгнуть, прежде чем отключить двигатели). Данные кнопки, кстати, есть только у квадрокоптеров с барометром;
— чуть ниже кнопка переключения скоростей (расходов): 1 сигнал — минимальная скорость, 2 сигнала — средняя, 3 — максимальная;
— еще ниже кнопка включения безголового режима полета(headless): при его активации пульт начинает издавать противный звук(слушай в видео о продолжительности полета).
В некоторых обзорах пишут, что в режиме headless квадрокоптеры отслеживают положение пульта по силе сигнала от него… Чушь! В этом режиме квадрокоптер всего лишь запоминает, куда был направлен его зад(хвост) в момент активации режима, и далее всегда считают, что там и находится оператор! Благодаря гироскопу, как бы не вращался квадрокоптер в пространстве, если вы включили безголовый режим в момент когда квадрик расположен к вам задом, он всегда будет лететь в ту сторону, куда вы его направляете! Режим этот нужен в принципе только если летать дальше метров пяти…
В обозреваемом квадрике безголовый режим работает вполне адекватно, в отличие от многих других квадрокоптеров, где еще добавляют на пульт кнопку возврата домой, по нажатии которой аппарат летит куда угодно, только не к вам.
А теперь о системе датчиков, делающей этот квадрокоптер уникальным среди дешевых комнатных дронов:
с 4-х боковых сторон, а также снизу находятся 5 штук(суммарно) направленных ИК светодиодов, излучающих скорее на своей отдельной частоте каждый свет в 5-ти разных направлениях.
Также внизу квадрокоптера находится принимающее сигнал устройство:
При подлете квадрокоптера к препятствию(стена, пол, диван или рука человека) на 10-20 см, излучение одного конкретного светодиода отражается от препятствия и улавливается приемником ИК излучения.
Управляющий процессор, зная с какого конкретно направления пришел отраженный сигнал, дает команду на резкий отлет от препятствия в противоположном направлении на расстояние 40-80 см примерно.
Данная система позволяет также играть с дроном, управляя им ладонями, даже не включая пульт вовсе! (На ярком солнце система работает впрочем хуже, но о полетах на улице см. в конце обзора).
После подключения разъема аккумулятора нужно поставить квадрокоптер на горизонтальную поверхность, в течение 3-х секунд произойдет калибровка гироскопа(светодиоды на носу(зеленый) и в хвосте(красный) перестанут быстро мигать и станут вспыхивать дважды с паузой). Все, можно запускать двигатели резким встряхиванием дрона или просто подбросить его в воздух!
JJRC H56, или просто TaiChi, очень стабилен в полете, продемонстрирую(как смог) работу стабилизации в полете:
При играх с квадрокоптером без пульта, не рекомендую отправлять его ладонью резко вверх, ибо тогда он может почти мгновенно взмыть до самого потолка и „присосаться“ к последнему. Тогда нужно бежать за стулом или пробовать достать его в прыжке, у кого потолки не слишком высокие.
Стойкость к падениям очень высокая, максимум что случалось, это слетал с оси один из воздушных винтов…
Вообще у этой модели винты держаться на оси ротора довольно слабо в отличие от простейшей модели JJRC H36, где стоят такие же двигатели диаметром 6 мм и высотой 15 мм, но там круговая защита лопастей чуть выше, и при авариях у меня постоянно слетала верхняя крышка (держится только на штифтах).
Далее тест продолжительности полета от одного полного заряда аккумулятора( итого: 6 минут 38 секунд): в кадре все время присутствует запущенный секундомер с самыми крупными цифрами, какой у себя нашел. Снимать секундомер второй камерой и делать картинку в картинке не стал, ибо легко сфальсифицировать показания… Минуты и секунды видны при просмотре видео в Full HD на большом дисплее.
Также в этом ролике можно приблизительно оценить все 3 скорости квадрокоптера, а также послушать звуки, которые издает пульт управления:
Сразу сделаю важный вывод о максимальной скорости полета: она ограничена программно (!), и по моим прикидкам, составляет менее 10 км/час! Хотя мощности двигателей должно хватать для скорости 20-25 км/ч.
Сделано это специально для дополнительной безопасности и стабильности полета в режиме управления только руками и для лучшего срабатывания системы избежания препятствий. В ролике видно, что если специально (даже на минимальной скорости) направить квадрокоптер в стену и не отпускать джойстик практически до касания стены, столкновение все равно произойдет даже с включенными сенсорами, хотя и будет смягчено.
Про полеты на улице и дальность действия пульта
Подумал, что раз уж делать обзор, то полный, с полетами на улице…
1) Выждал солнечный день с ветром 2-3 м/с по прогнозу, нашел близлежащий огороженный сеткой теннисный типа корт(асфальтовый). Расстояние по диагонали из угла в угол около 35 метров. Запустил по этой самой диагонали на высоте метра 2. Квадрик бодренько так долетел почти до самого угла, я решил его вернуть обратно… Но этот гад продолжал лететь в прежнем направлении, только чуть медленнее, и уперся в сетку! При этом связь с пультом не прерывалась, иначе бы он сразу совершил аварийную посадку! Повел его вправо, он пролетел 2 метра чиркая о сетку и наконец упал. Подошел, поднял, поставил на место отвалившийся 1 пропеллер… И тут сообразил, что квадрик я запускал по ветру, на тот момент метра 3-4 в секунду навскидку!
Запускаю строго против ветра, как и прежде на максимальной скорости: куда там! Даже попыткой сопротивляться ветерку это назвать нельзя! Летит сам туда, куда дует ветер.
2) Решаю измерить по GPS расстояние, с которого работает пульт: отхожу от квадрика на 50 метров и пытаюсь взлететь кнопкой автовзлета — нихрена, 30 метров — то же самое, с 4 метров взлетаю…
3)Для очистки совести, по неразумению, пытаюсь на глаз измерить максимальную высоту полета: на свободной площадке за футбольными воротами стадиона ближайшей школы запускаю квадрокоптер вертикально вверх! Секунды 3 любуюсь как он резво поднялся вверх метров на 25, и тут он начинает очень быстро покидать меня в направлении деревьев за забором метрах в 40 от меня! Судорожно включаю безголовый режим и пытаюсь вернуть. Пару секунд даже у меня это получается, но все тщетно, деревья все ближе. Нажимаю кнопку посадки и бегу к забору. Квадрик медленно снижается…
В момент перелезания через забор теряю квадрик из виду…
Ну что ж, бросив взгляд на вершины деревьев, до которых дрон(как я надеюсь) не долетел, начинаю прокладывать ногами концентрические круги диаметром метров 15 по высокой траве и кустарнику в поисках. 1-2-3...5 минут… Начинаю мысленно прощаться с ним(»ну хоть успел немного в квартире поиграться, да и пульт вот остался..") Стоп! Пульт!!! Включаю на пульте, встав приблизительно в центре области поиска, запуск двигателей без взлета (левый джойстик вверх), и снова хожу кругами… И о чудо, вдруг улавливаю ушами знакомый комариный писк квадрика, иду на звук и он у меня в руках, 1 слетевший пропеллер висит тут же на траве!
Все! Домой! Никакой улицы!
Вывод: 1)расстояние действия пульта в полете не менее 35 метров.
2)из-за маленького веса, большой парусности и низкой скорости, на улице летать только в штиль и не выше двух метров!
Тест грузоподъемности(груз — аккумулятор ааа):
Квадрик бодро взлетает с грузом и даже несколько секунд размахивает этим грузом по комнате, как не знаю чем…
Потом сила тяжести возвращает груз на землю, а квадрокоптер, натужно ревя двигателями, таскает его по ковру, пока не цепляется пропеллером и не крашиться. Думаю с граммами семью бы летал, но лучше не на тросе, см. самый последний ролик.
А теперь ближе к детям, точнее к ребенку пяти лет, для игр с которым данная игрушка как бы и покупалась:
— как только квадрокоптер начал летать, ребенок с криком: «Дроны атакуют!» убежал в другую комнату, и отказывался оттуда выходить, пока не выключили… Насмотрелся, блин, корейских мультиков на Ютюб! Причем боялся именно звука, издаваемого квадрокоптером! Мелкие дроны издают звук, похожий на раздражающее жужжание (писк/звон) комаров.
«Облом,»-подумал я, но предпринял еще одну попытку приобщения младого поколения к прелестям управления современными воздушными судами…
Решил привлечь в дело одну самую маленькую из его любимых игрушек, героя одного из так любимых им корейских мультфильмов, некоего пожарного Роя:
Две полоски двухстороннего скотча от 3М, слой плотного поролона, еще две полоски скотча…
Летает, делает безболезненно флипы, выдерживает несколько падений:
… но все тщетно. Сам тандем ребенка заинтересовал(в руках таскал,) но запущенный в полет квадрик с фигуркой жужжал так же «опасно», и пожарный Рой по настойчивой просьбе был опущен на землю и отпущен на свободу…
Отзывы на JJRC H56 TaiChi
Достоинства квадрокоптера JJRC H56 TaiChi:
— уникальная в его ценовой нише система избегания столкновения с препятствиями;
— самостоятельное удержание высоты посредством встроенного барометра;
— возможность управления/игр вообще без пульта управления;
— возможность сразу летать/парить в воздухе практически без обучения.
Недостатки:
— программное ограничение максимальной скорости полета;
— непригоден для гонок и обучения фигурам высшего пилотажа.
Все фото и видео снято на телефон, там же и отредактировано и смонтировано.
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...