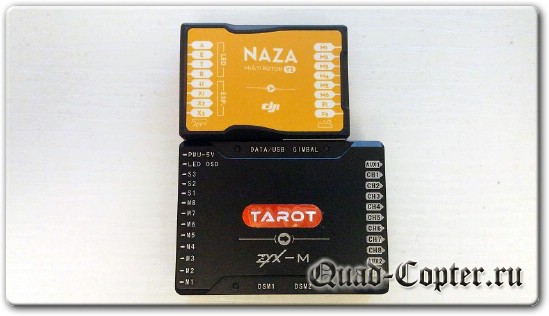
Кто только сейчас не пытается обойти полетный контролер Naza! Недавно мы рассказывали о JIYI P2, а сегодня рассмотрим еще одного "убийцу Назы" от компании Tarot.
Квадрокоптеры сегодня весьма модное увлечение и многие фирмы производят свои контроллеры полета, вот и не безизвестный производитель подвеса Tarrot T-2D подтянулся на рынок полетных контроллеров.
Tarot ZYX-M — это полетный контроллер для мультироторного летательного аппарата. Поддерживает до 8 моторов и может работать с двумя DSM сателлитами, что сильно увеличивает безопасность полетов.
В этом полетном контроллере используется 32 битный процессор, ативибрационная прокладка и металлический корпус. Как писали на англоязычном форуме — квадрокоптер может быть "вдребезги", но Tarot ZYX-M останется без повреждений!
Поставляется Tarot ZYX-M в коробке с мягкой защитной упаковкой.
Это важно, так как почта России весьма небрежно относится к доставке посылок и при плохой упаковке содержимое может быть повреждено. Но, упакованный таким образом контроллер полета квадрокоптера от Tarrot повредить сложно.
Комплектация поставки Tarot ZYX-M весьма "богатая" и соперничает с Naza V2, при этом цена его ниже чем у Naza Lite.
Вместе с контроллером идет блок PMU (Power Management Unit), GPS антенна, стойка для нее, блок индикации, блок контроллера для подключения к компьютеру через USB, USB шнур, провода соединения с каналами приемника, набор креплений из 2-х стороннего скотча 3M.
Калибровка гироскопов осуществляется следующим образом — необходимо подключить квадрокоптер к ПК, установить копетр на ровную поверхность и в ПО ассистент нажать кнопку "Calibrate Gyroscope". Дождитесь пока в строке состояния высветится "ОК" и гироскопы будут откалиброваны.
Калибровка акселерометра - необходимо снять контроллер с квадрокоптера, подключить к ПО и нажать в нем кнопку "CalibrateAccelerometer". После этого необходимо удерживать контроллер на ровном столе в каждой из 6 плоскостей (плоских сторонах контроллера) не менее 2-х секунд.
Калибровка компаса — переключите тумблер переключения полетных режимов GPS-ATI 10 раз (индикатор загорится синим цветом), после этого возьмите квадрокоптер в руки и повернитесь вокруг своей оси на 450 градусов (индикатор станет зеленым), теперь надо повернуть квадрокоптер "носом вниз" и еще раз повернуться на 450 градусов (индикатор прекратит светится зеленым). Калибровка компаса Tarot ZYX-M завершена.
Как выполнить арминг Tarot ZYX-M
Арминг моторов на контроллере Tarot ZYX-M выполняется следующим образом — опустите оба стика вниз и сведите их в центр (друг к другу), подержите в таком положении 2 секунды и моторы запустятся.
Видеообзор Tarot ZYX-M на русском языке
Посмотрите видеообзор полетного контроллера Tarot ZYX-M, в нем рассказывается и показывается подключение, настройка, калибровки и полеты на квадрокоптере.
Где скачать ПО Ассистент для Tarot ZYX-M
Скачать программу для настройки Tarot ZYX-M можно тут.
Особенности полетного контроллера Tarot ZYX-M
Возможна установка контроллера в любое удобное место рамы, под углом к оси квадрокоптера 0/90/180/270 градусов.
Свободно назначаемые каналы управления.
Поддержка подвесов Tarot от производителя.
Поддержка шасси (с возможностью автоматически убираються при превышении высоты 5 м и выдвигаться при снижении менее 5 метров).
Зарезервированы два канала для дистанционного управления OSD.
Отдельный канал на включение режима "Возврат в точку взлета".
Автоматический "Возврат в точку взлета" и посадка при потере сигнала.
Задание ограничений по высоте и дальности полета через ПО.
Включение или выключение зон ограничения полета
Полетные режимы Atti / GPS / Manual
Стандартные режимы ориентирования IOC + режим точка интереса
Задание высоты возврата в режиме F/S
По своим размерам Таротовский контроллер больше Назы, да и тяжелее за счет металлического корпуса.
В связи с тем, что производитель позиционирует его для больших квадрокоптеров предназначенных для съемки видео — вес самого контроллера особой роли не играет. Зато металлическая коробка отлично защищает от наводки помех от видеопередатчика и регуляторов двигателей.
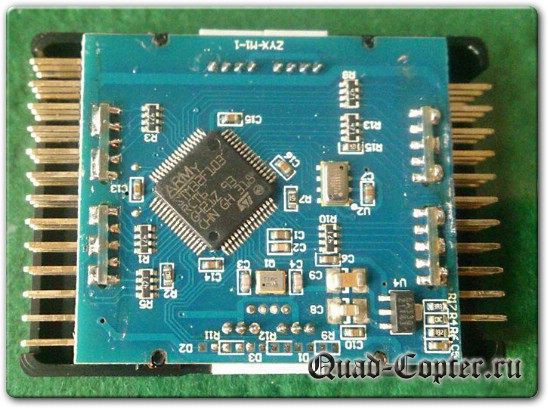
Сняв крышку можно посмотреть на плату контролера и его процессор.
Обратите внимание на виброизоляционные прокладки — они уменьшают воздействие вибрации на датчики полетного контроллера.
Все это позволяет Тароту весьма хорошо управлять квадрокоптером в полете.
Вот видео тестового полета на небольшом гексакптере с контроллером Тарот.
Технические характеристики полетного контроллера Tarot ZYX-M:
Поддерживаются схемы мультироторов: три, квадро, гекса, октокоптеры. Так же поддерживаются соосные схемы.
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...