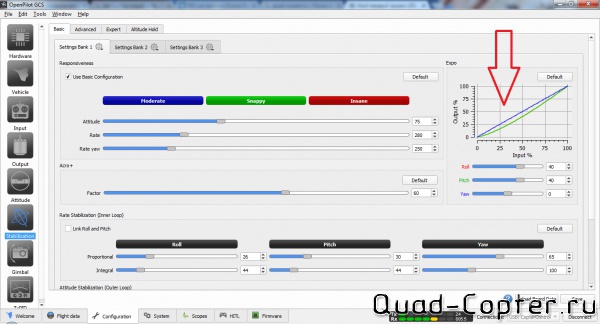
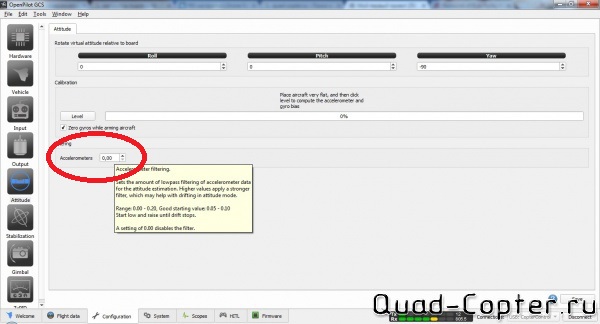
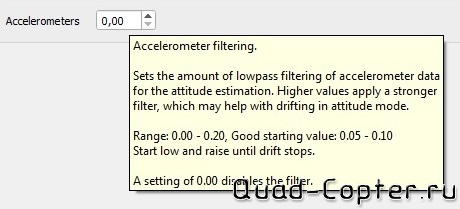
Борьба со сносом в CC3D
Публикатор: l_lemon


Рейтинг: 0
Голосов: 0
19615 просмотров
Комментарии (0)
Нет комментариев. Ваш будет первым!
Случайные статьи
Новые видео о дронах - ежедневные обновления!




RC модельное видео
Новости форума
26 декабря 2024 |
|
Nikita отвечает в теме «APM 2.б» на форуме «Полетные контроллеры» |
Подскажите, пожалуйста, кто может помочь. Хочу подключить регулятор к полетнику, вот такие. Возможно ли это? |
||
24 декабря 2024 |
|
Nikita отвечает в теме «Писк регуляторов» на форуме «Моторы и регуляторы» |
Подскажите, пожалуйста, кто может помочь. Хочу подключить регулятор к полетнику, вот такие. Возможно ли это? |
||
28 октября 2024 |
|
nZr начинает тему «Продам квадрокоптер X210RF 14т.р» на форуме «Куплю - продам» |
Классическая рама 5 дюймов Realacc X210Pro, полётник RaceFlight Revolt F4 V2 32KHz,, камера Foxeer Falkor 3 Mini 1200TVL, видеопередатчик Eachine TS5828-S 40CH 5.8G 600mW. На борту стоит... |
||
31 августа 2024 |
|
pilon707 начинает тему «Квадрокоптер Walkera Rodeo 150 двигатели не работают» на форуме «Покупные квадрокоптеры» |
Во время полета квадрокоптер ударился о дерево и упал... когда я пытался взлететь после этого.... двигатели не вращаются. Что это ESC сгорел? |
||
27 августа 2024 |
|
pilon707 отвечает в теме «Пульт DEVO 7 и приемник к DEVO RX701» на форуме «Другая электроника» |
Посмотри тут https://walkerahelicopter.proboards.com/thread/8/binding-devo-tx-rx |
||
27 августа 2024 |
|
pilon707 отвечает в теме «Квадрокоптер Walkera Rodeo 150 не биндится приемник» на форуме «Покупные квадрокоптеры» |
Нашел тут...все биндится https://walkerahelicopter.proboards.com/thread/8/binding-devo-tx-rx |
||
12 июля 2024 |
|
Ruslan.R начинает тему «Прошу совета по настройке» на форуме «Самодельные проекты» |
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно... |
||
Поиск
YouTube канал сайта

Самые читаемые статьи











Новые статьи
RC магазины






