С некоторых пор плотно подсел на тинивупы. Уже попробовал парочку: на бесколлекторных 0703-моторах и коллекторных 0716-моторах. Время полета у них сильно отличается. Бесколлекторный летает полторы-две минуты на LiHV-аккумуляторах 260мА/ч, коллекторный 3.5-4 минуты.
Причем, по динамике не скажу, что коллекторный сильно уступает. Да, подхват не тот, но время полета значительно больше. Приглянулся еще один квадрик на бесколлекторных 0603-моторах HB64. Наверное, это должно быть что-то среднее между двумя предыдущими квадриками. Вот и проверю!
Кроме 0603-моторов на 16000kV, заинтересовала рама. Она сделана по принципу, как рама RaconHeli для бесколлекторных тинивупов - карбоновое основание и пластиковые держатели моторов с защитой.
Краткие характеристики квадрика HB64:
База: 64мм
Вес: 24.7 грамм
Взлетный вес: 31.4 грамм
Моторы: 0603/16000kV
Диаметр пропеллеров: 31мм
Полетный контроллер: Omnibus F3
Блок регуляторов: Teeny1S
Камера: CM275T
Приемник: FlySky FS82
Аккумулятор: GNB LiHV 250мА/ч, 9.7 грамм
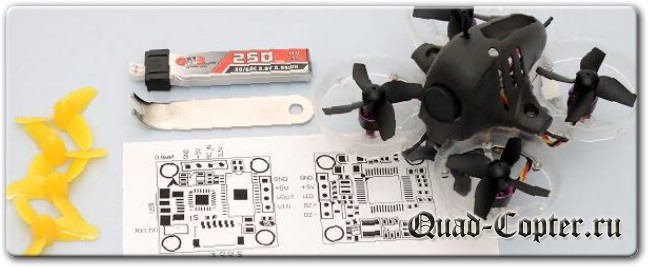
Квадрик HB64 приехал в пластиковом контейнере, но внутри все было не зафиксировано и болталось, хотя и упаковано в пакеты.
В комплекте, кроме квадрика, нашлась инструкция к полетному контроллеру, комплект запасных трехлопастных пропеллеров, съемник и хайвольтный аккумулятор на 250мА/ч.
Странно, на квадрике стоят четырехлопастные пропеллеры, а запасные - трехлопастные.
Несмотря на прочную упаковку, квадрик приехал с повреждениями. Один держатель мотора был с трещинами и лопнула одна из трех стоек прямо рядом с мотором. Материал этих держателей жестковат и хрупковат, похож на чистый поликарбонат, не выдержат они долго. Лучше бы из нейлона сделали. В продаже запасных пока не видел, только если брать оригинальные от RaconHeli и надеяться, что по посадочным отверстиям подойдут.
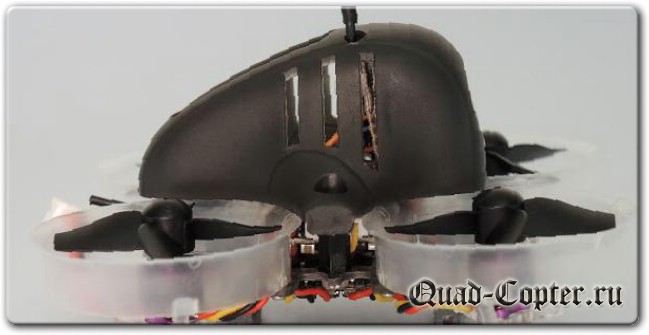
Первое впечатление - квадрик HB64 непропорционально высокий! Рама довольно жесткая, не хлипкая, как у коллекторного варианта того же размера или как рама Beta65 Pro.
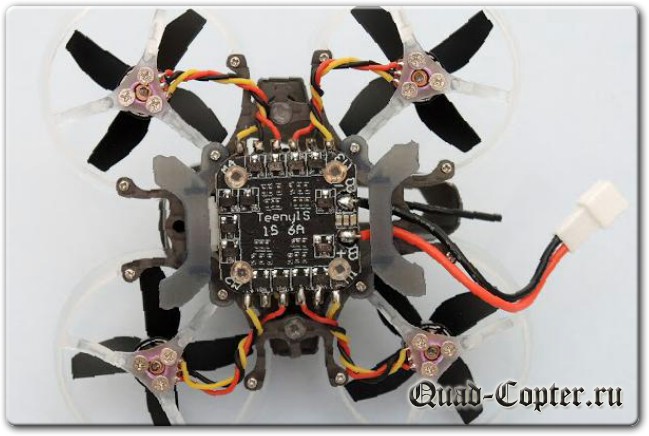
Снизу хорошо видно блок регуляторов 4-в-1 Teeny1S. Рама квадрика позволяет устанавливать электронику с посадочными отверстиями 16x16мм или стандартные платы тинивупного размера с посадочными отверстиями 26x26мм.
Аккумулятор устанавливается в скобы из мягкого пластика. Скобы с упорами, чтобы квадрик устойчиво на ровную поверхность вставал.
На квадрике установлены бесколлекторные 0603-моторы на 16000kV с валом диаметром 1мм. Моторы на латунных втулках - не лучшее решение, но в таком размере на подшипниках будут еще хуже.
Это обновленная версия моторов с развальцованным валом, что исключает разделение мотора на ротор и статор:) Магниты на роторе очень тугие, мотор проворачивается с заметным усилием.
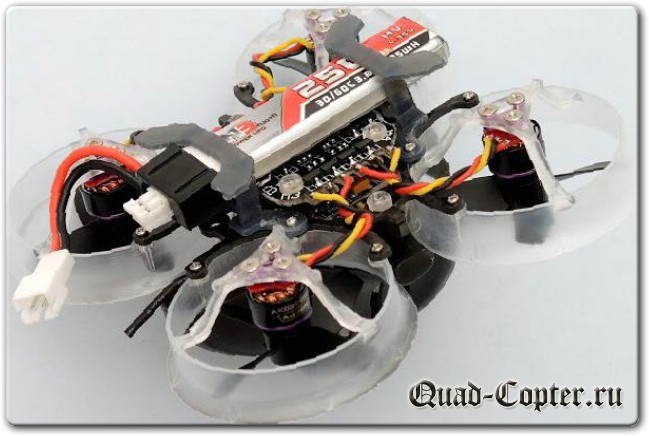
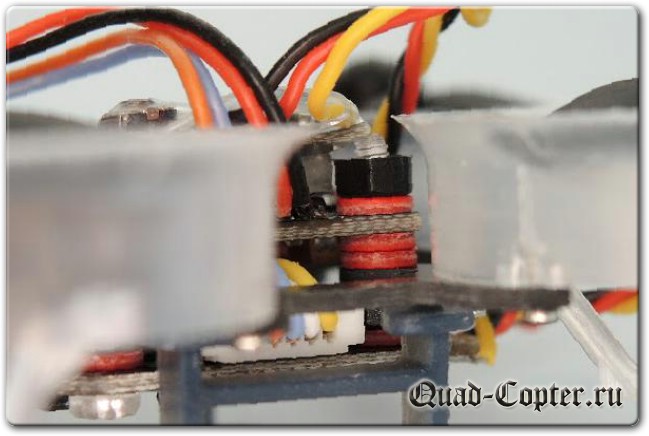
Если присмотреться, то видно, что электроника на раму установлена через шайбы, похожие на демпферы. Увы, это обычные пластиковые шайбы красного цвета, а не силиконовые. Стек собран жестко с рамой.
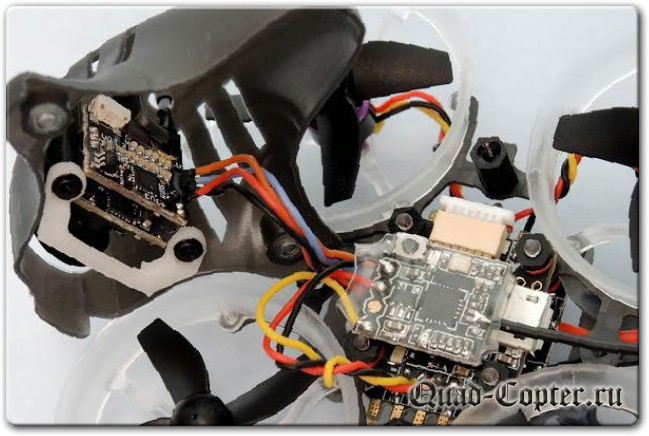
Для того, чтобы забиндить квадрик с пультом, надо добраться до маленькой кнопки на приемнике. Если изловчиться, то это можно сделать и не снимая канопу. Сквозь вырез в канопе видно USB-разъем для настройки полетного контроллера.
Канопа снимается очень легко - просто откручиваются пара пластиковых болтиков по бокам. Вес капоны не маленький, целых 1.9 грамма! Зато она уже с креплением для камеры.
Приемник приклеен к полетному контроллеру на кусочек силикона. Хорошо видна кнопка на приемнике, с помощью которой можно забиндить квадрик и пульт.
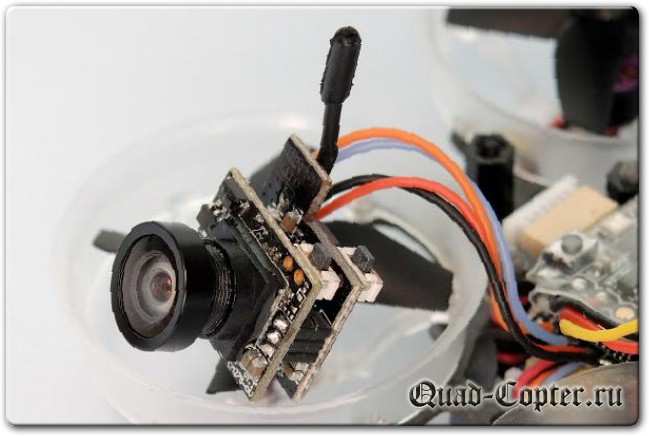
На квадрике установлена одна из самых популярных камер CM275T. Честно говоря, мне она не очень нравится тем, что картинка с нее получается с оттенками желто-зеленого и не очень хорошо работает WDR.
И кстати, почему-то камера не переключается в PAL-режим. Если удерживать переднюю кнопку несколько секунд, то операция переключения вроде бы проходит, но картинка по прежнему остается в NTSC-режиме. В качестве антенны к передатчику припаян проводок длиной 13мм.
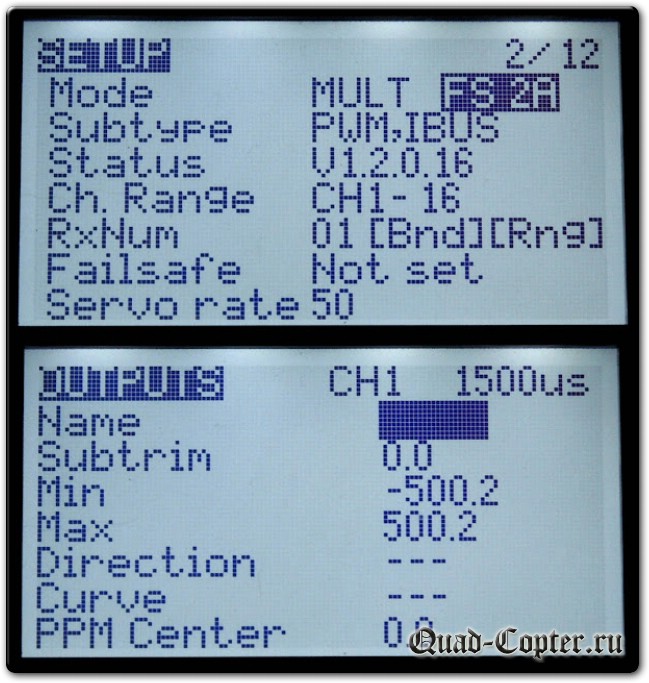
Первым делом забиндил приемник и пульт Taranis QX7 с установленным мультипротокольным модулем iRangeX IRX4. В пульте выбрал протокол управления 'FS 2A', зажал кнопку на приемнике и подал питание через USB-разъем. Все получилось с первого раза.
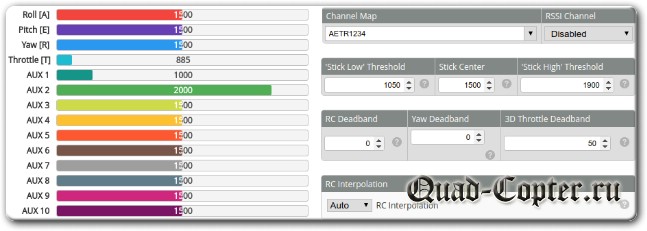
Затем подключил квадрик к компьютеру и в пульте немного подправил диапазон выходного сигнала по первым восьми каналам, чтобы в BetaFlight на вкладке 'Receiver' получить значения 1000-2000.
Изначально в полетном контроллере квадрика HB64 была установлена прошивка BetaFlight-3.1.7-OMNIBUS. Были сделаны только настройки подключения приемника к полетному контроллеру, все остальное было абсолютно по дефолту. Вот дамп этих настроек.
Буду заливать в полетный контроллер самосборную прошивку из свежего среза исходных текстов BetaFlight. Тоже самое можно получить из ночных сборок.
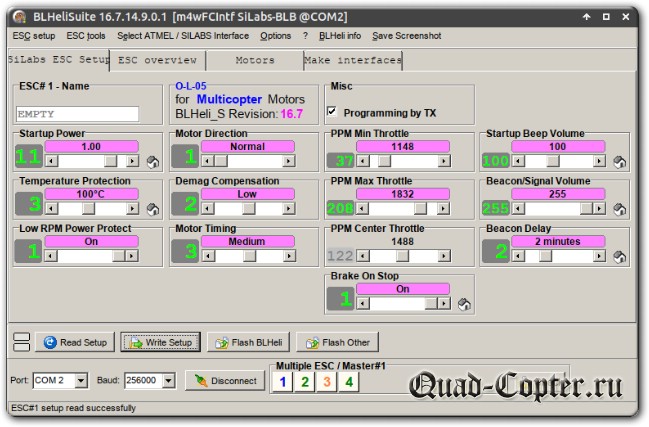
После обновления прошивки в полетном контроллере, сразу же обновил и прошивку регуляторов. Изначально там стояла BLHeli_S-16.6, с помощью BLHeliSuite поставил версию 16.7.
Сразу же заработал маяк на моторах и после настройки будет доступен режим 'античерепаха'. Громкость маяка надо выкручивать на максимум, иначе квадрик вообще не слышно, если включить писк моторами.
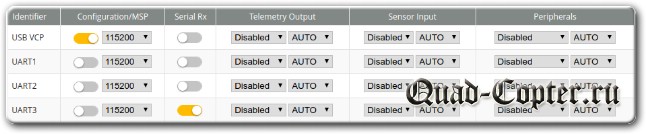
Настройки сделал самые обычные, даже PID-ы подобрал просто на глаз. Хотелось побыстрее облетать аппарат:) В портах выставил подключение приемника к UART3.
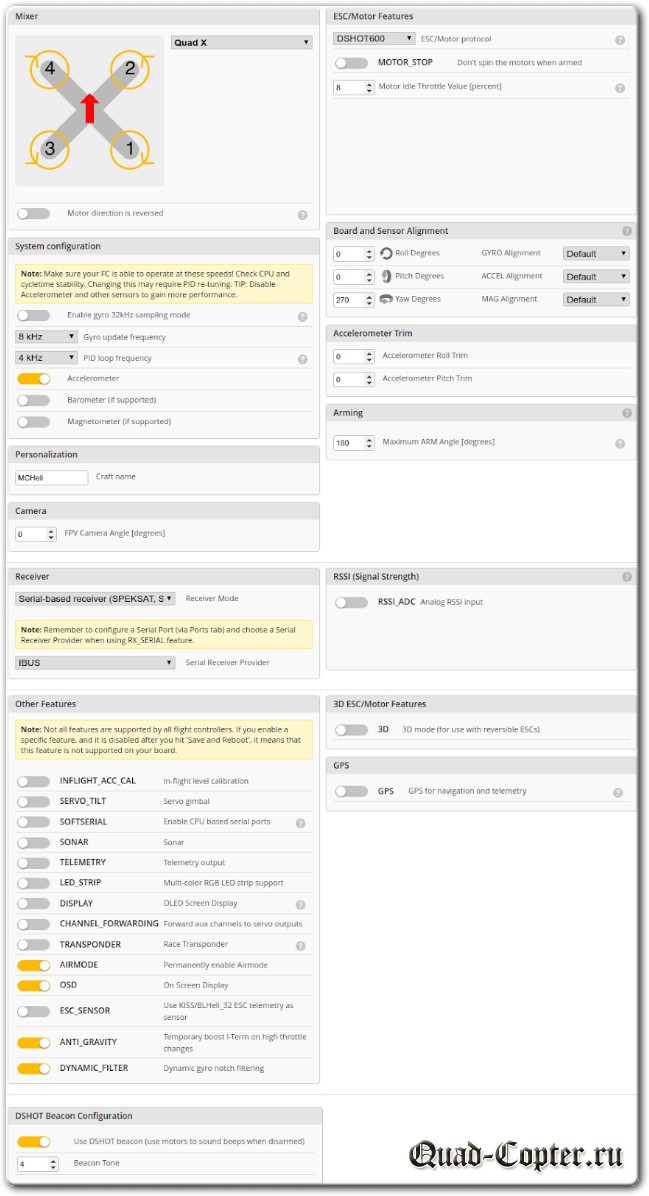
В настройках выставил протокол управления DShot600 - цифра рулит:) Минимальный газ пришлось поднять до 8%, иначе из-за сильных магнитов при арминге моторы не могли стартовать. Скорость работы гироскопов выставил 8/4, при 8/8 процессор загружался на 100%. Включил динамические фильтры и возможность издавать писк моторами.
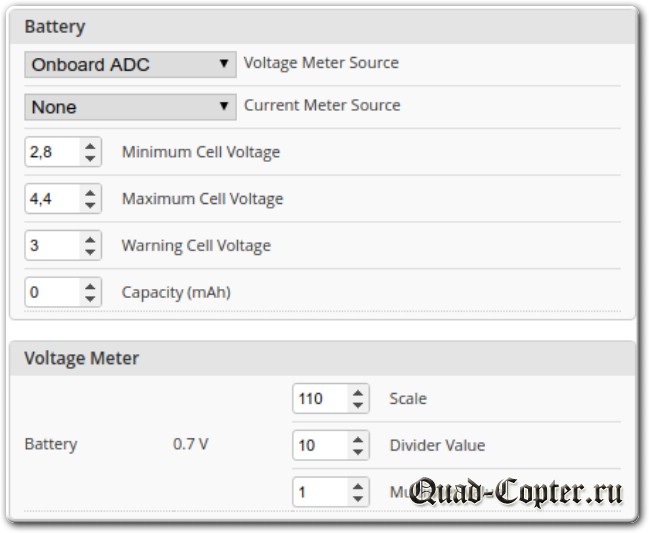
В настройках питания отключил датчик тока - его нет. Приподнял максимальное напряжение до 4.4В, чтобы не было проблем с хайвольтными аккумуляторами. Сначала забыл снизить минимальное напряжение и квадрик в полете все время бросал сообщение на OSD о низком напряжении. Потом уже исправил на 2.8В.
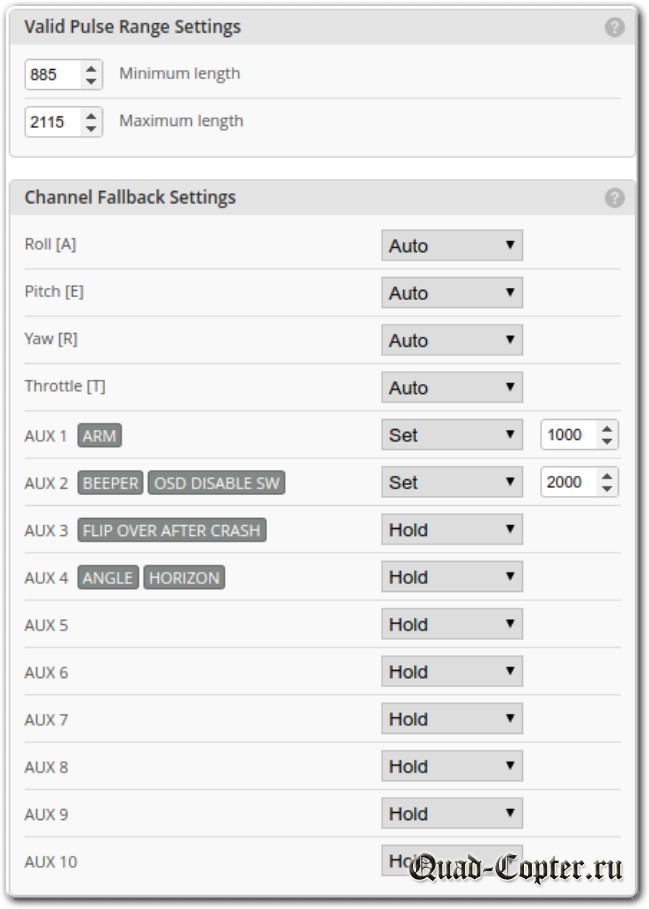
В настройках FailSafe выставил дизарм и включение писка при потере сигнала.
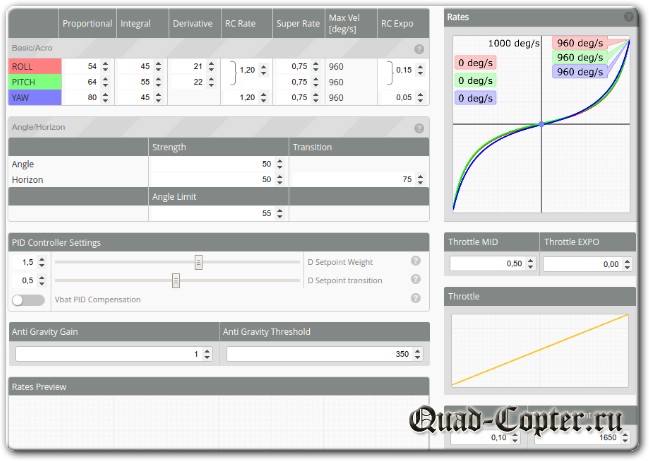
PID-ы еще до конца не настроены - это сделаю позже. Расходы выставил такие же, как сейчас стоят на тренировочном хламолете и они отлично подошли.
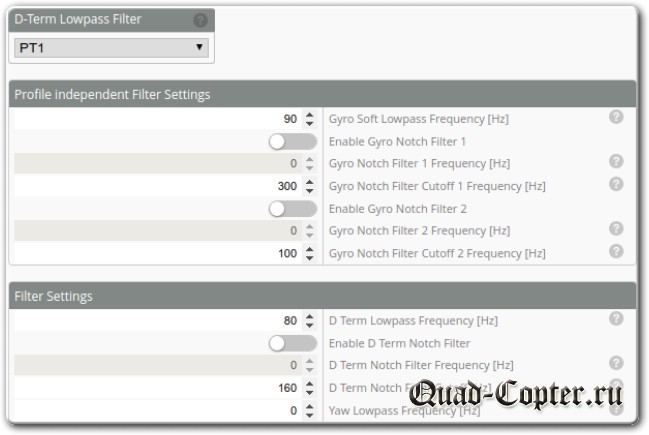
Отключил все фильтры и выставил тип LPF-фильтра PT1. Еще понизил 'D-Term' до 80Гц.
На вкладке приемника ничего не менял. Хотел выставить вручную 'RC Interpolation', но не знаю даже приблизительного значения, которое может быть при использовании FlySky-приемника, а логов блэкбокса нет, чтобы это выяснить - оставил автоматическое.
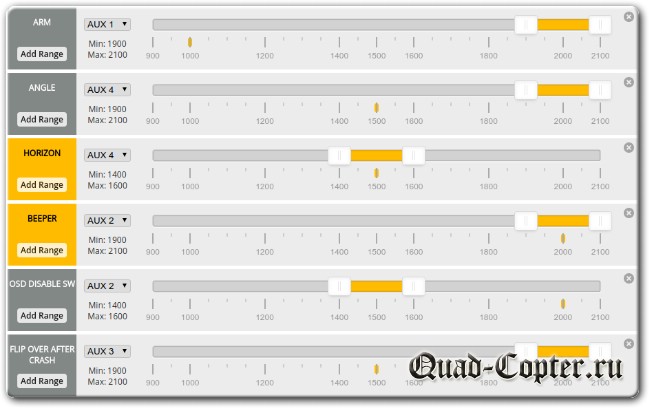
В режимах раскидал доступные четыре AUX-канала по функциям. На всякий случай сделал режимы Angle и Horizon, хотя ими не пользуюсь. Включил пищалку на тумблере, сделал отключение OSD и настроил на тумблер новомодную функцию 'античерепаха'.
В настройках OSD вывел на экран только ник, напряжение аккумулятора, полетное время и уровень газа.
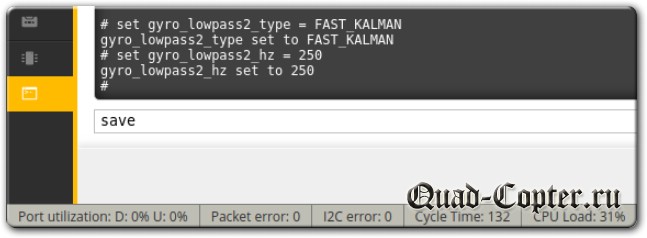
В консоли включил фильтр Калмана и выставил на него частоту в 250Гц.
Вот полный дамп моих настроек квадрика HB64. С ними нагрузка на процессор не превышает 31% - нормально.
Когда первый раз поднял квадрик в воздух, то был удивлен его стабильностью. В акро-режиме он висел как приколоченный! Квадрик оказался даже более стабильным, чем FullSpeed BeeBee-66. По звуку работы моторов очень похож на коллекторного коллегу.
Время полета на стоковом аккумуляторе на 250мА/ч составило ровно две с половиной минуты. Просадка по питанию начинается за несколько секунд до падения, мало шансов дотянуть до точки взлета:) Остальное время квадрик очень легко подхватывается по высоте, флипы-роллы делает практически на месте без потери высоты. Пока что сделал всего десяток полетов, но уже и так понятно, что 0603-моторы оптимальны для квадрика такого размера. И да, квадрик HB64 сильно перетяжелен, можно еще скинуть пару-тройку грамм. Хотя он даже в таком виде получился легче коллекторного собрата.
В планах было пересадить моторы на раму Beta65 Pro и заменить полетный контроллер на Racerstar Crazybee F3, но стоковая рама понравилась своей жесткостью. Тем более, у нее удобнее аккумулятор фиксируется. Не поленился и снял начинку с квадрика.
Разница в весе двух рам не очень большая. Beta65 Pro весит 3.55гр, а рама HB64 - 4.5гр. Если уложиться в сухой вес грамм в 20 или чуть меньше, то можно попробовать более емкие аккумуляторы, весом 12-14 грамм. Это должно значительно прибавить время полета.
По ресурсу 0603-моторов пока рано делать выводы. Всего-то было только десяток полетов. После каждых полетушек буду капать на латунные втулки масло для высокоскоростных подшипников. Надеюсь, это увеличит их ресурс:)
Чуть позже хочу взять на обзор еще парочку моделей этого же производителя: HB65 и HB75. А на этом пока все, удачных полетов!
Всем добрый день! Подскажите советом пожалуйста, приобрел гоночный дрон Chimera CX10 6S , очень нужна функция зависания в воздухе, в программе Betaflight никак не могу эту функцию найти,может нужно...